简历模板大学生湖北搜索引擎优化
目录
1 UART帧格式详解
1.1 UART简介
1.2 通信基础 - 并行和串行
1.3 通信基础 - 单工和双工
1.4 通信基础 - 波特率
1.5 UART帧格式
2 Exynos4412下的UART控制器
2.1 引脚功能设置
2.2 阅读芯片手册
3 UART寄存器详解
3.1 引脚寄存器
3.2 串口寄存器概览
3.3 ULCONn(帧格式)
编辑 3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
3.5 状态寄存器
3.6 接收数据,发送数据的寄存器
3.7 设置波特率
4 UART编程
4.1 interface.c实验代码
4.2 printf重定向
4.3 练习
1 UART帧格式详解
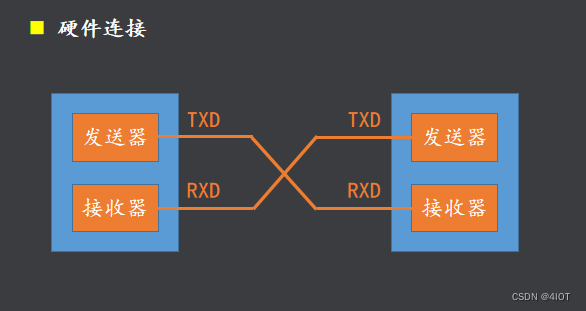
1.1 UART简介
Universal Asynchronous Receiver Transmitter 即 通用异步收发器,是一种通用的串行、异步通信总线 该总线有两条数据线,可以实现全双工的发送和接收 在嵌入式系统中常用于主机与辅助设备之间的通信
1.2 通信基础 - 并行和串行
并行通讯(多个数据线一起发送)
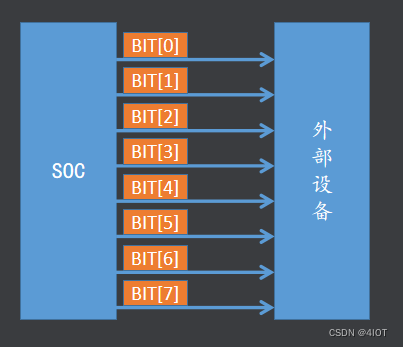
串行通信(一个个字节发送)

1.3 通信基础 - 单工和双工
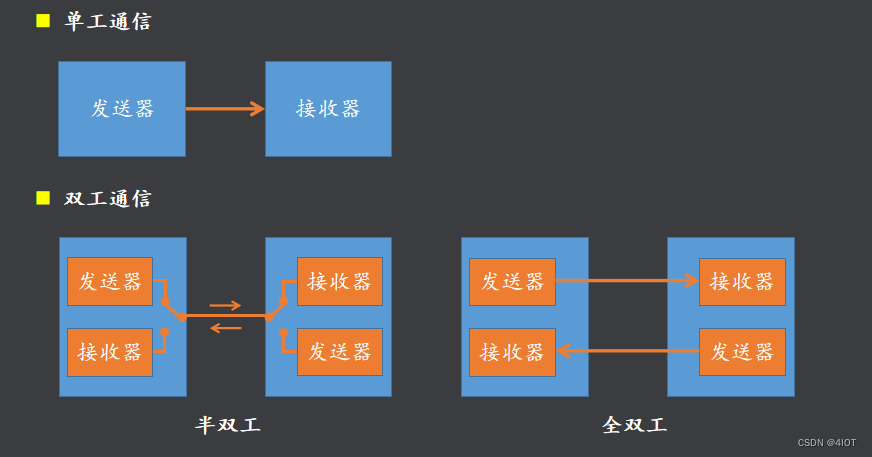
半双工要不能同时发送和接收,全双工可以同时发送和接收。
1.4 通信基础 - 波特率
波特率用于描述UART通信时的通信速度,其单位为bps(bit per second)即每秒钟传送的bit的数量
1.5 UART帧格式

串口协议中规定,先发低位再发高位
例:数据0x55 二进制01010101->发送顺序10101010
校验位很少使用,多发了一位数据,会使得通讯速度变慢
如果发送多个字节重复上面的动作,必须一个一个字节发送,附带停止位和起始位,否则发送0xFF这种数据,全是高电平,无法得知是发送了还是没发送。
串口发送的速率是根据自身的时钟速率掐时间计算。如A主机发送速率1s1个,但是接收方可能接收的数据对于A来说是0.9S1个,时间一长数据会乱。所以一般规定每次最多发8位,之后重新获取起始位,避免误差增大。
2 Exynos4412下的UART控制器
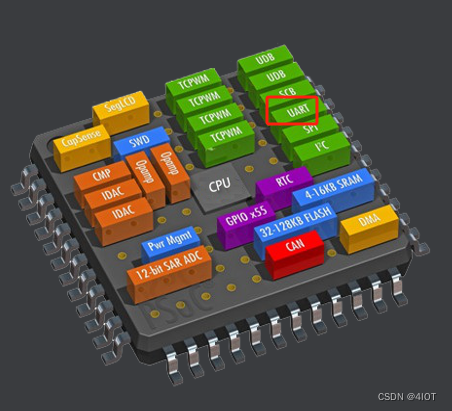
一般情况下处理器中都会集成UART控制器 我们使用UART进行通信时候只需对其内部的相 关寄存器进行设置即可
2.1 引脚功能设置
查看扩展板原理图
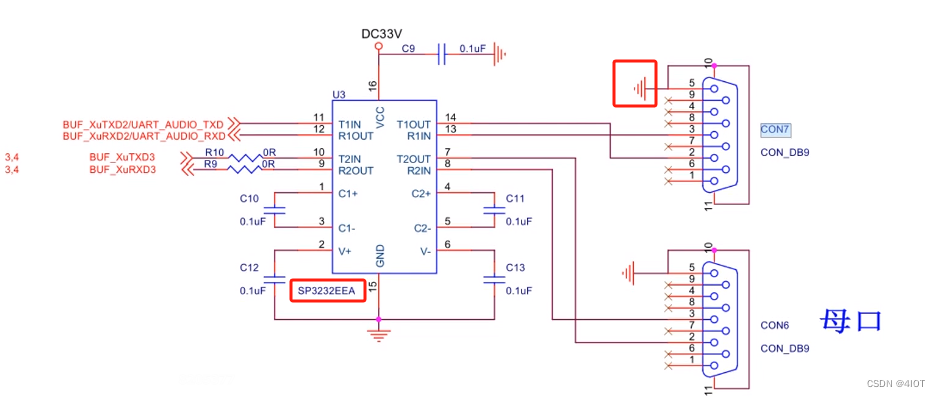
SP3232EEA芯片的作用是把串口发出来的TTL信号转换成232信号,增加了串口的通讯距离
查看核心板原理图

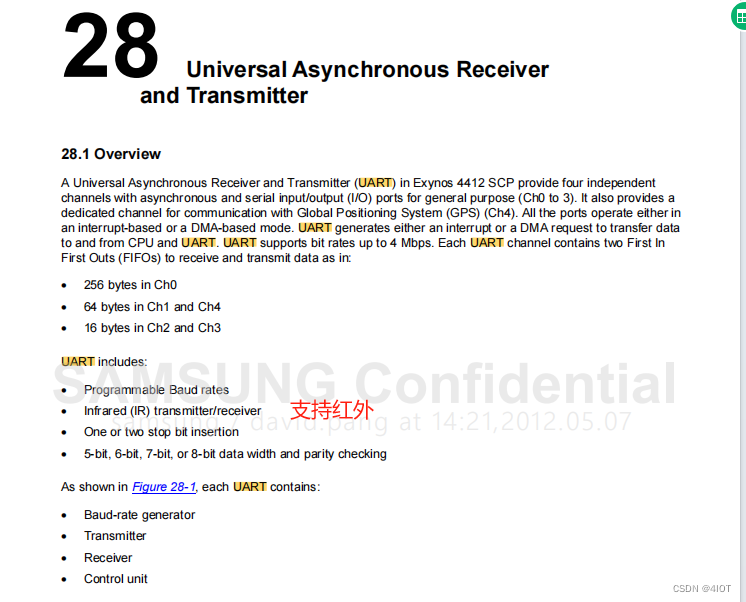
2.2 阅读芯片手册
芯片手册4412一共包含了5个串口通道,包含一个可以与GPS通讯的Ch4。串口控制器的时钟是100Mhz,支持DMA,串口中断,每个串口包含FIFO。
功能框图
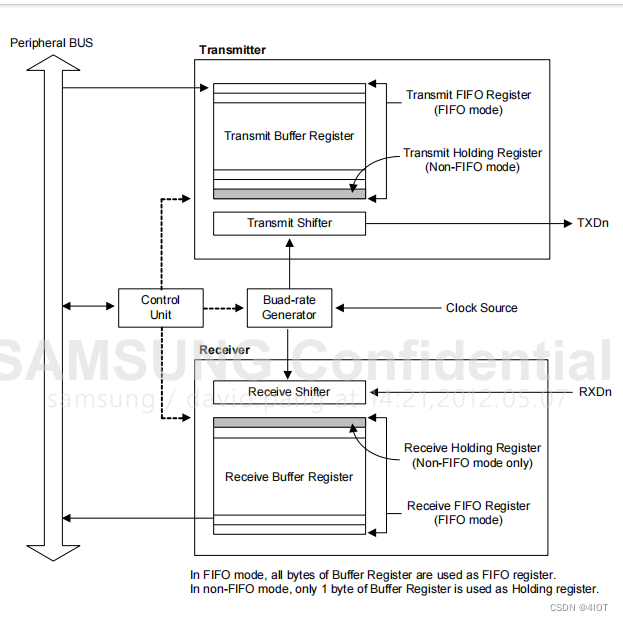
总线是CPU与串口芯片相连,发送、接收及访问控制单元。
红外GPS暂不详细介绍
3 UART寄存器详解
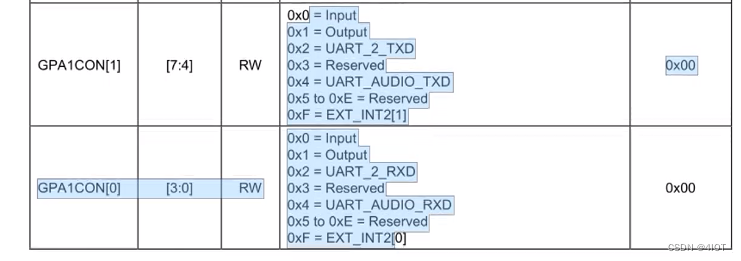
3.1 引脚寄存器
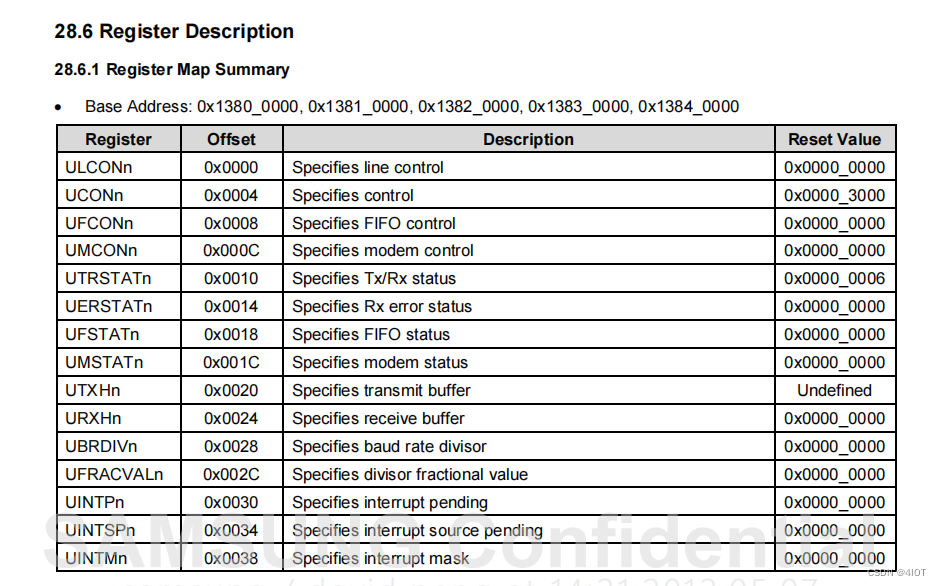
3.2 串口寄存器概览
5个串口寄存器内部是一样的,使用串口2基地址0x1382_0000
3.3 ULCONn(帧格式)
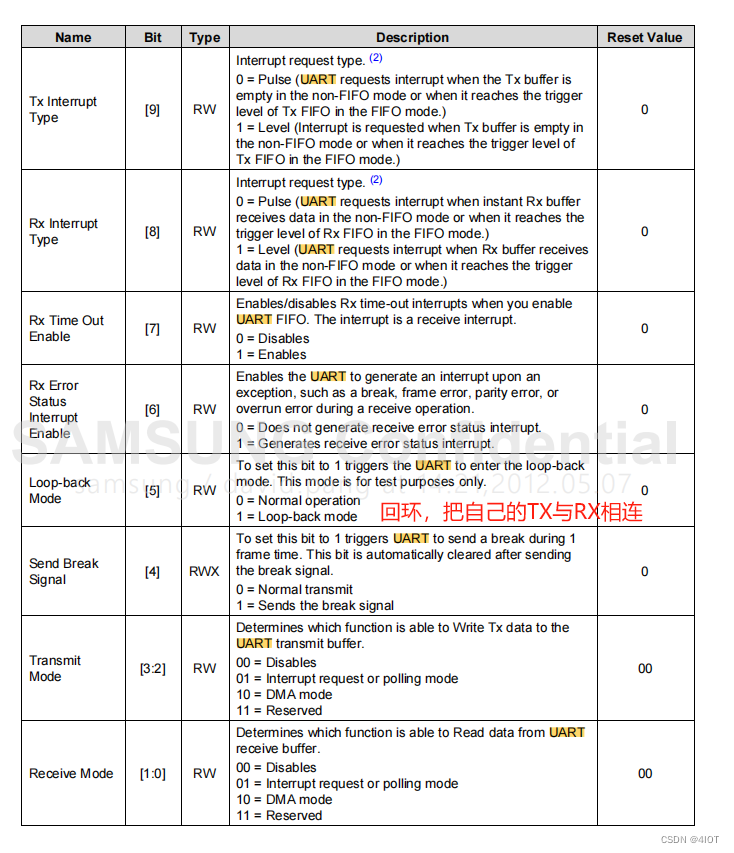
 3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
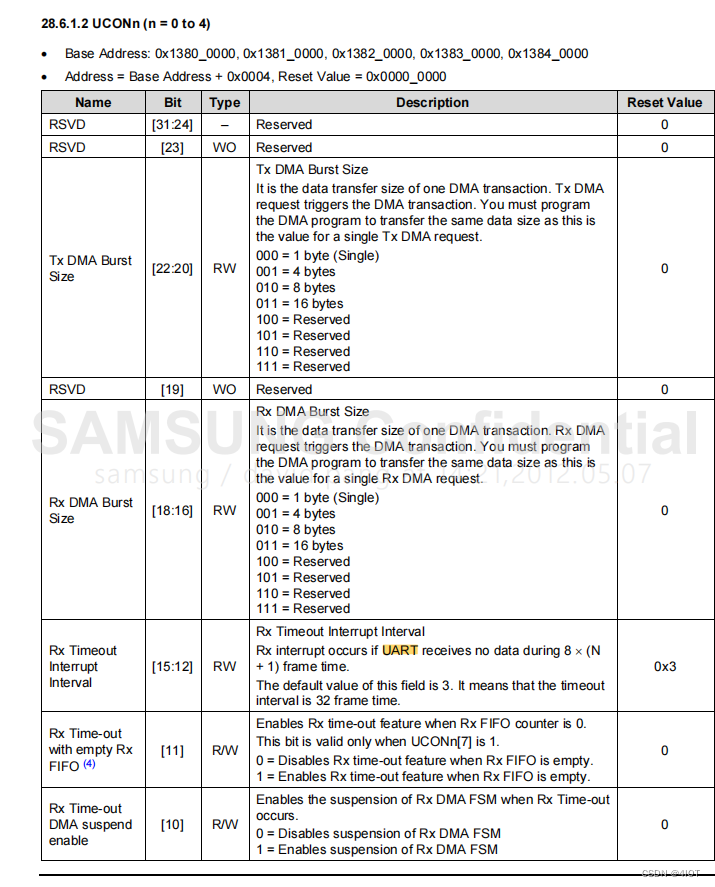
接收串口数据一般有3种方式:
1.轮询,定期CPU去访问FIFO
2.中断,有数据来了通知CPU去读取
3.DMA,有数据来了直接由DMA搬到内存中,不需要CPU去干涉
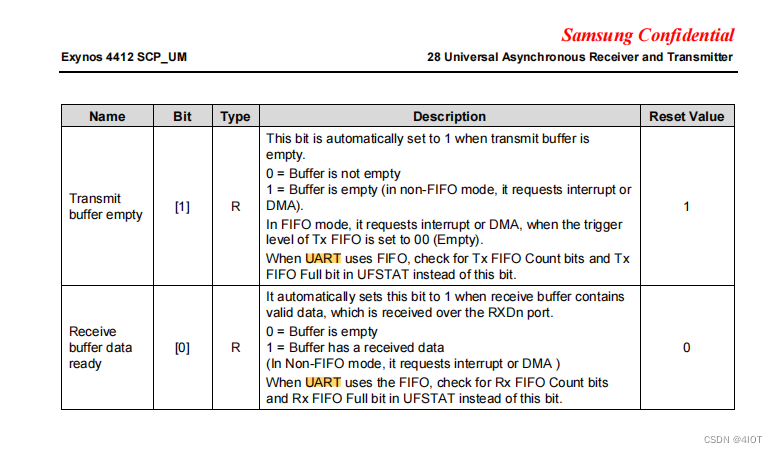
3.5 状态寄存器
 状态寄存器中一般为只读寄存器,可用于判断串口接收发送的状态
状态寄存器中一般为只读寄存器,可用于判断串口接收发送的状态
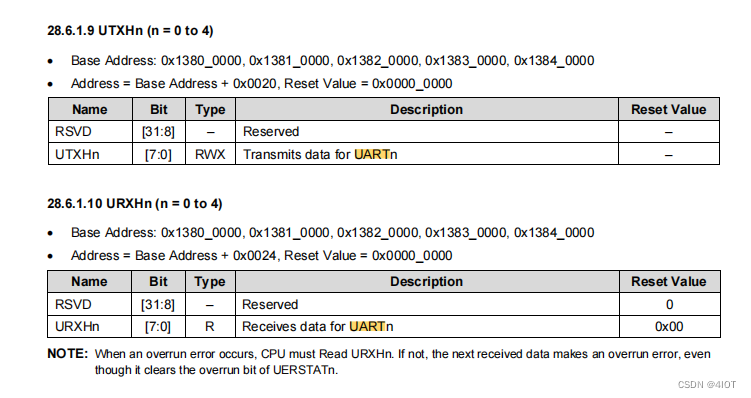
3.6 接收数据,发送数据的寄存器
3.7 设置波特率

波特率公式,案例用的时钟频率是40Mhz,我们开发板的串口时钟寄存器是100Mhz
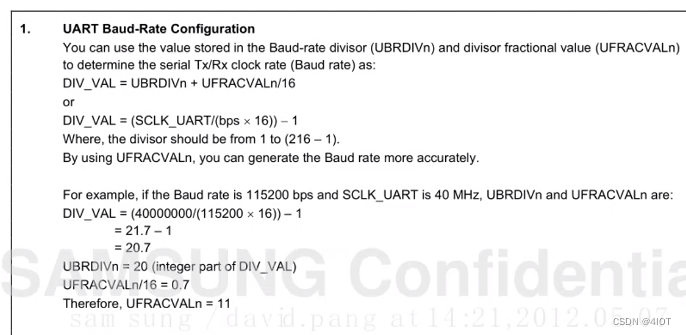
UBRDIVn = 20(整数部分)
UFRACVAL =0.7(小数部分)*16 ≈ 11(四舍五入),因为串口按位发送会校准所以可以忽略
4 UART编程
引脚寄存器
帧格式

接收和发送模式为轮询

100000000/(115200 *16)-1 ≈ 53.25
UBDIV2 = 取整 = 53
UFRAVVAL2 = 0.25 * 16 = 4
4.1 interface.c实验代码
#include "exynos_4412.h"void UART_Init(void)
{/*1.将GPA1_0和GPA1_1设置成UART2的接收和发送引脚 GPA1CON[7:0]*/GPA1.CON = GPA1.CON & (~(0xFF << 0)) | (0x22 << 0);/*2.设置UART2的帧格式 8位数据位 1位停止位 无校验 正常模式 ULCON2[6:0]*/UART2.ULCON2 = UART2.ULCON2 & (~(0x7F << 0)) | (0x3 << 0);/*3.设置UART2的接收和发送模式为轮询模式 UCON2[3:0]*/UART2.UCON2 = UART2.UCON2 & (~(0xF << 0)) | (0x5 << 0);/*4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2*/UART2.UBRDIV2 = 53;UART2.UFRACVAL2 = 4;
}void UART_Send_Byte(char Dat)
{/*等待发送寄存器为空,即上一个数据已经发送完成 UTRSTAT2[1]*/while(!(UART2.UTRSTAT2 & (1 << 1)));/*将要发送的数据写入发送寄存器 UTXH2*/UART2.UTXH2 = Dat;
}char UART_Rec_Byte(void)
{char Dat = 0;/*判断接收寄存器是否接收到了数据 UTRSTAT2[0]*/if(UART2.UTRSTAT2 & 1){/*从接收寄存器中读取接收到的数据 URXH2*/Dat = UART2.URXH2;return Dat;}else{return 0;}
}void UART_Send_Str(char * pstr)
{while(*pstr != '\0')UART_Send_Byte(*pstr++);
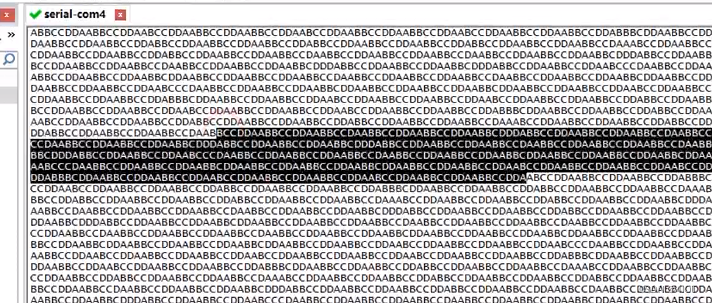
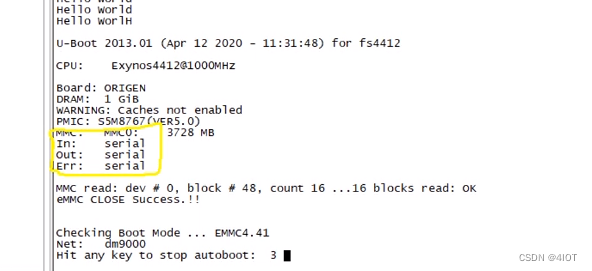
}int main()
{char RecDat = 0;UART_Init();while(1){RecDat = UART_Rec_Byte();if(RecDat == 0){}else{RecDat = RecDat + 1;UART_Send_Byte(RecDat);}UART_Send_Str("Hello World\n");//重定向的printfprintf("Hello World\n");}return 0;
}
注:
寄存器只能显示字符,无法显示数字,如果需要发送和接收数字要转换为对应的字符的ASCII码
如果CPU写入的速度过快,超过串口发送器发送的速度会使得接收端的数据错乱。需要对发送状态寄存器进行判断后进行发送和接收。
4.2 printf重定向
printf的功能实现已经再src中实现了,函数比较复杂,不做详细介绍
printf调用了puts,puts内部调用了putc,我们修改了putc的程序实现了重定向
定向功能在uart.c中实现。
printf的区别
1来源:没有操作系统在printf.c中,而有操作系统是调用的C库的区别
2输出定向不一样:重定向输出到串口,输出到linux终端
4.3 练习
1.若使用UART协议发送一个字节的数据0x63,画出信号线上的时序图
注:8位数据位、无校验位、一位停止位
略
2.编程实现电脑远程控制LED状态
注:在终端上输入‘2’,LED2点亮,再次输入‘2’,LED2熄灭... ...
#include "exynos_4412.h"void LED_Init(void)
{GPX2.CON = GPX2.CON & (~(0xF << 28)) | (0x1 << 28); //LED2 GPX2_7 output//GPX1.CON = GPX1.CON & (~0xF) | 0x1; //LED3 GPX1_0 output//GPF3.CON = GPF3.CON & (~(0xF << 16)) | (0x1 << 16); //LED4 GPF3_4 output//GPF3.CON = GPF3.CON & (~(0xF << 20)) | (0x1 << 20); //LED5 GPF3_5 output
}void Led_on(int num){switch(num){case 2:GPX2.DAT = GPX2.DAT | (1 << 7);case 3:GPX1.DAT = GPX1.DAT | (1 << 0);case 4:GPF3.DAT = GPF3.DAT | (1 << 4);case 5:GPF3.DAT = GPF3.DAT | (1 << 5);default:break;}}void Led_off(int num){switch(num){case 2:GPX2.DAT = GPX2.DAT & ~(1 << 7);case 3:GPX1.DAT = GPX1.DAT & ~(1 << 0);case 4:GPF3.DAT = GPF3.DAT & ~(1 << 4);case 5:GPF3.DAT = GPF3.DAT & ~(1 << 5);default:break;}}void UART_Init(void)
{/*1.将GPA1_0和GPA1_1设置成UART2的接收和发送引脚 GPA1CON[7:0]*/GPA1.CON = GPA1.CON & (~(0xFF << 0)) | (0x22 << 0);/*2.设置UART2的帧格式 8位数据位 1位停止位 无校验 正常模式 ULCON2[6:0]*/UART2.ULCON2 = UART2.ULCON2 & (~(0x7F << 0)) | (0x3 << 0);/*3.设置UART2的接收和发送模式为轮询模式 UCON2[3:0]*/UART2.UCON2 = UART2.UCON2 & (~(0xF << 0)) | (0x5 << 0);/*4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2*/UART2.UBRDIV2 = 53;UART2.UFRACVAL2 = 4;
}void UART_Send_Byte(char Dat)
{/*等待发送寄存器为空,即上一个数据已经发送完成 UTRSTAT2[1]*/while(!(UART2.UTRSTAT2 & (1 << 1)));/*将要发送的数据写入发送寄存器 UTXH2*/UART2.UTXH2 = Dat;
}char UART_Rec_Byte(void)
{char Dat = 0;/*判断接收寄存器是否接收到了数据 UTRSTAT2[0]*/if(UART2.UTRSTAT2 & 1){/*从接收寄存器中读取接收到的数据 URXH2*/Dat = UART2.URXH2;return Dat;}else{return 0;}
}void UART_Send_Str(char * pstr)
{while(*pstr != '\0')UART_Send_Byte(*pstr++);
}int main()
{char RecDat = 0;int toggle = 0;UART_Init();LED_Init();while(1){RecDat = UART_Rec_Byte();if(RecDat == '2'){if(toggle == 0){Led_on(2);toggle = 1;}else{Led_off(2);toggle = 0;}}/*UART_Send_Str("Hello World\n");*/}return 0;
}