网站如何自己做优化世界杯数据分析
目录
- 0 专栏介绍
- 1 ROS2路径平滑器介绍
- 2 平滑器插件编写模板
- 2.1 构造平滑器插件类
- 2.2 注册并导出插件
- 2.3 编译与使用插件
- 3 基于B样条曲线的路径平滑
0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。
🚀详情:《ROS2从入门到精通》
1 ROS2路径平滑器介绍
路径平滑器(smoother)是Nav2中的一个任务服务器,它实现了nav2_behavior_tree::SmoothPath接口,主要负责改善路径的平滑度或质量,Nav2中默认的平滑器包括
| 名称 | 作者 | 介绍 |
|---|---|---|
Simple Smoother | Steve Macenski | 为不可行的2D规划器提供更平滑的简单路径 |
Constrained Smoother | Matej Vargovcik与Steve Macenski | 使用约束问题求解器优化各种标准(如平滑度或与障碍物的距离)的路径平滑器,保持最小转弯半径 |
Savitzky-Golay Smoother | Steve Macenski | 使用Savitzky-Golay滤波器通过数字信号处理平滑路径,以去除路径中的噪声。 |
本文介绍路径平滑器插件的编写范式,并提供一个全新的基于B样条曲线平滑的插件
2 平滑器插件编写模板
2.1 构造平滑器插件类
所有路径平滑插件的基类是nav2_core::Smoother,该基类提供了7个纯虚方法来实现控制器插件,一个合法的平滑器插件必须覆盖这7个基本方法:
configure():在平滑器服务器进入on_configure状态时会调用此方法,此方法执行ROS2参数声明和平滑器成员变量的初始化;activate():在平滑器服务器进入on_activate状态时会调用此方法,此方法实现平滑器进入活动状态前的必要操作;deactivate():在平滑器服务器进入on_deactivate状态时会调用此方法,此方法实现平滑器进入非活动状态前的必要操作;cleanup():在平滑器服务器进入on_cleanup状态时会调用此方法,此方法清理为平滑器创建的各种资源;smooth():接受一个原始路径,并提供具体的平滑实现
按照上述标准,本文案例中B样条平滑器的基本成员函数和变量如下所示
namespace nav2_smoother
{class BSplineSmoother : public nav2_core::Smoother{public:/*** @brief A constructor for nav2_smoother::BSplineSmoother*/BSplineSmoother() = default;/*** @brief A destructor for nav2_smoother::BSplineSmoother*/~BSplineSmoother() override = default;void configure(const rclcpp_lifecycle::LifecycleNode::WeakPtr &,std::string name, std::shared_ptr<tf2_ros::Buffer>,std::shared_ptr<nav2_costmap_2d::CostmapSubscriber>,std::shared_ptr<nav2_costmap_2d::FootprintSubscriber>) override;void cleanup() override { costmap_sub_.reset(); }void activate() override { RCLCPP_WARN(logger_, "Using: B-spline smoother"); }void deactivate() override {}/*** @brief Method to smooth given path** @param path In-out path to be smoothed* @param max_time Maximum duration smoothing should take* @return If smoothing was completed (true) or interrupted by time limit (false)*/bool smooth(nav_msgs::msg::Path &path,const rclcpp::Duration &max_time) override;std::shared_ptr<trajectory_generation::BSpline> bspline_gen_;std::shared_ptr<nav2_costmap_2d::CostmapSubscriber> costmap_sub_;rclcpp::Logger logger_{rclcpp::get_logger("BSplineSmoother")};};
}
2.2 注册并导出插件
在创建了自定义平滑器的前提下,需要导出该平滑器插件以便平滑器服务器可以在运行时正确地加载。在ROS2中,插件的导出和加载由pluginlib处理。
-
源文件配置导出宏
#include "pluginlib/class_list_macros.hpp" PLUGINLIB_EXPORT_CLASS(nav2_smoother::BSplineSmoother, nav2_core::Smoother) -
配置插件描述文件
xxx_smoother.xml,例如本案例为bspline_smoother.xml文件。此XML文件包含以下信息:library path:插件库名称及其位置;class name:平滑算法类的名称;class type:平滑算法类的类型;base class:平滑基类的名称,统一为nav2_core::Smootherdescription:插件的描述。
实例如下
<class_libraries><library path="bspline_smoother"><class type="nav2_smoother::BSplineSmoother" name="bspline_smoother/BSplineSmoother" base_class_type="nav2_core::Smoother"><description>B-Spline smoother</description></class></library> </class_libraries> -
配置
CMakeLists.txt文件
使用cmake函数pluginlib_export_plugin_description_file()来导出插件。这个函数会将插件描述文件安装到install/share目录中,并设置ament索引以使其可被发现,实例如下pluginlib_export_plugin_description_file(nav2_core bspline_smoother.xml) -
配置
package.xml描述文件,实例如下:<export><build_type>ament_cmake</build_type><nav2_core plugin="${prefix}/bspline_smoother.xml" /> </export>
2.3 编译与使用插件
编译该插件软件包,接着通过配置文件使用插件。
参数的传递链如下:首先在simulation.launch.py中引用配置文件navigation.yaml
declare_params_file_cmd = DeclareLaunchArgument('params_file',default_value=os.path.join(simulation_dir, 'config', 'navigation.yaml'),description='Full path to the ROS2 parameters file to use for all launched nodes')
接着在navigation.yaml中修改插件配置,默认如下,用的是SimpleSmoother插件:
smoother_server:ros__parameters:use_sim_time: Truesmoother_plugins: ["simple_smoother"]simple_smoother:plugin: "nav2_smoother::SimpleSmoother"tolerance: 1.0e-10max_its: 1000do_refinement: True
将上述替换为自己的插件,本案例为:
smoother_server:ros__parameters:use_sim_time: Truesmoother_plugins: ["simple_smoother"]simple_smoother:plugin: "bspline_smoother/BSplineSmoother"
接着运行即可看到平滑算法被替换
3 基于B样条曲线的路径平滑
B样条曲线是一种用于表示和描绘曲线的数学工具,它在计算机图形学、计算机辅助设计、计算机动画和数值分析等领域得到广泛应用。其名称中的B代表了基本(basis),而样条则是在各个领域中广泛应用的一种绘制曲线的技术,例如计算机图形学、物理学模拟、金融和经济分析等。在计算机图形学中,样条通常用于创建平滑的曲线和曲面,以便在三维场景中呈现出更真实的效果。在物理学模拟中,样条可用于描述物体的运动轨迹和变形过程。

具体算法原理请参考:
- 曲线生成 | 图解B样条曲线生成原理(基本概念与节点生成算法)
- 曲线生成 | 图解B样条曲线生成原理(附ROS C++/Python/Matlab仿真)
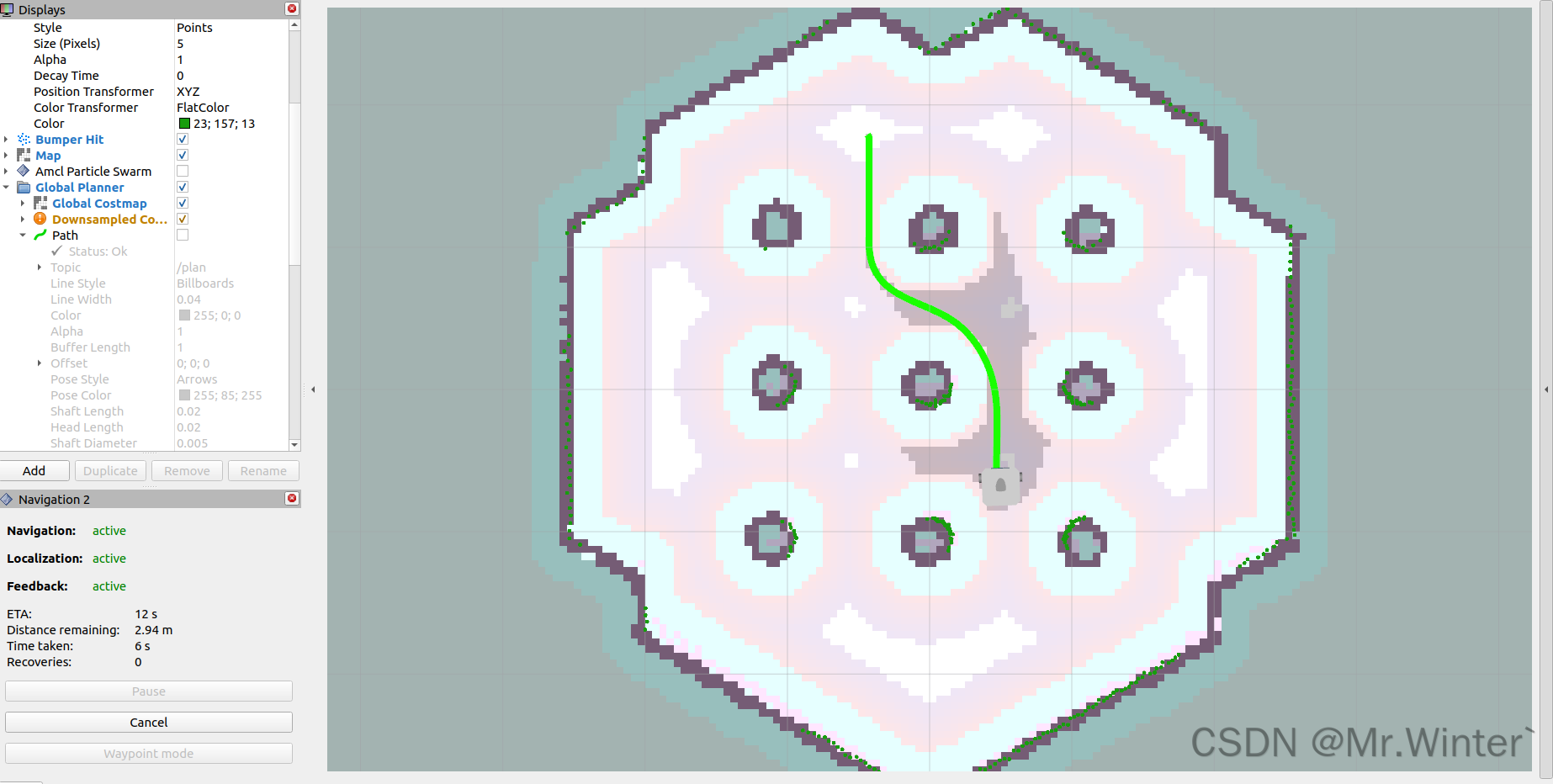
平滑器的效果如下所示,其中红色是原始A*算法的规划路径,绿色是B样条曲线平滑后的路径

完整代码通过下方博主名片联系获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …