建设银行手机银行登录网站百度登录页面
STM32f103C8T6 FreeRTOS - 按键实现任务挂起和恢复,按键按下时,LED任务执行,led闪烁,当led任务挂起,Led停止闪烁。
1.STM32CubeMX 创建任务
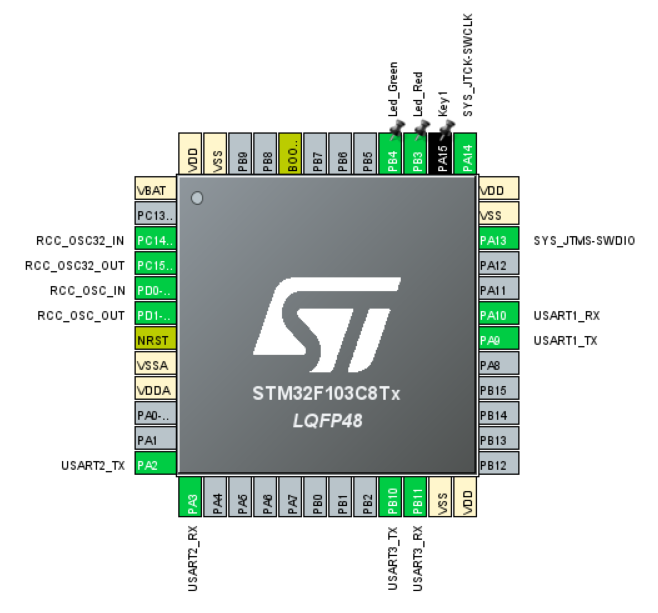
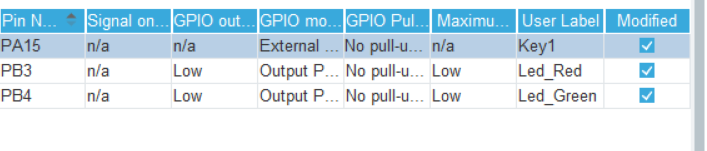
1.1配置GPIO
按键配置外部中断触发
GPIO绿灯,红灯配置输出模式
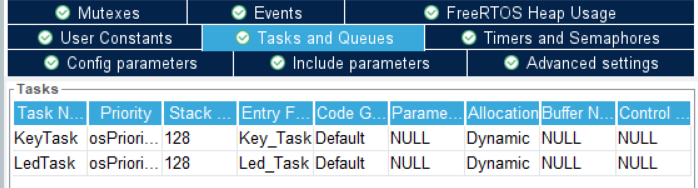
1.2配置FreeRTOS
创建按键与LED任务,按键优先级正常,LED优先级稍微低。
2.Keil编写
2.1 外部中断回调
在配置文件中stm32f1xx_hal_gpio.c 中,调用HAL_GPIO_EXTI_Callback
/*** @brief EXTI line detection callbacks.* @param GPIO_Pin: Specifies the pins connected EXTI line* @retval None*/
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{/* Prevent unused argument(s) compilation warning */UNUSED(GPIO_Pin);/* NOTE: This function Should not be modified, when the callback is needed,the HAL_GPIO_EXTI_Callback could be implemented in the user file*/
}2.2 gpio.c按键实现Led颜色切换
//按键检测回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(Key1_Pin == GPIO_Pin) //判断按下的GPIO{if ( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_RESET) //按下按键,导通{HAL_Delay(10); //软件去抖动 if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_RESET){HAL_GPIO_WritePin(GPIOB,Led_Red_Pin,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB,Led_Green_Pin,GPIO_PIN_SET);}}else{if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_SET) // 高电平,未准备好 { HAL_Delay(10); //软件去抖动 if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_SET){ HAL_GPIO_WritePin(GPIOB,Led_Red_Pin,GPIO_PIN_SET); //关闭红灯HAL_GPIO_WritePin(GPIOB,Led_Green_Pin,GPIO_PIN_RESET); //开启绿灯}}}}
}3.实现任务挂起与恢复
3.1任务挂起和恢复函数

3.1.1 函数vTaskSuspend()
此函数用于将某个任务设置为挂起状态,进入挂起态的任务永远不会进入运行态。退出挂起态的唯一方法就是调用任务恢复函数vTaskResume()或xTaskResumeFromISR(),函数申明如下:
void vTaskSuspend( TaskHandle_t xTaskToSuspend)入口参数:
xTaskToSuspend: 要挂起的任务的任务句柄。可通过函数xTaskGetHandle()来根据任务名字获取某个任务的任务句柄。如果参数为NULL表示挂起任务自己。
返回值:无
3.1.2 函数vTaskResume()
将一个任务从挂起态恢复到就绪态,只有通过函数vTaskSuspend()设置为挂起态的任务才可以用vTaskResume()恢复,函数申明如下:
void vTaskResume(TaskHandle_t xTaskToResume)入口参数:
xTaskToResume: 要恢复的任务的任务句柄
返回值:无
3.2实现函数
gpio.h中建立标志位
/*定义一个枚举,建立三个状态*/
typedef enum{Key_up,Key_down,Key_reset,
}teKeyStatus;gpio.c
//按键检测回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(Key1_Pin == GPIO_Pin) //判断按下的GPIO{if ( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_RESET) //按下按键,导通{HAL_Delay(10); //软件去抖动 if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_RESET){/*建立标志位*/keyStatus = Key_down;}}else{if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_SET) // 高电平,未准备好 { HAL_Delay(10); //软件去抖动 if( HAL_GPIO_ReadPin(GPIOA,GPIO_Pin) == GPIO_PIN_SET){ /*建立标志位*/keyStatus = Key_up;}}}}
}freertos.c外部声明
extern teKeyStatus keyStatus; //外部申明 编写Task
/* USER CODE BEGIN Header_Key_Task */
/*** @brief Function implementing the KeyTask thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_Key_Task */
void Key_Task(void const * argument)
{/* USER CODE BEGIN Key_Task */keyStatus = Key_reset;/* Infinite loop */for(;;){if(keyStatus == Key_up){/*挂起LED任务*/vTaskSuspend(LedTaskHandle);keyStatus = Key_reset;}if(keyStatus == Key_down){/*恢复LED任务*/vTaskResume(LedTaskHandle);keyStatus = Key_reset; }/* 扫描周期10ms */osDelay(10);}/* USER CODE END Key_Task */
}
/* USER CODE BEGIN Header_Led_Task */
/**
* @brief Function implementing the LedTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Led_Task */
void Led_Task(void const * argument)
{/* USER CODE BEGIN Led_Task *//* Infinite loop */for(;;){HAL_GPIO_WritePin(GPIOB,Led_Red_Pin,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,Led_Green_Pin,GPIO_PIN_SET); osDelay(500);HAL_GPIO_WritePin(GPIOB,Led_Red_Pin,GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB,Led_Green_Pin,GPIO_PIN_RESET); osDelay(500); }/* USER CODE END Led_Task */
}