织梦响应式网站模板百度搜索优化建议
这个函数是工业自动化系统中用于控制ABB机器人执行特定任务,主要负责参数配置和任务状态监测。

目录
一、函数实例化
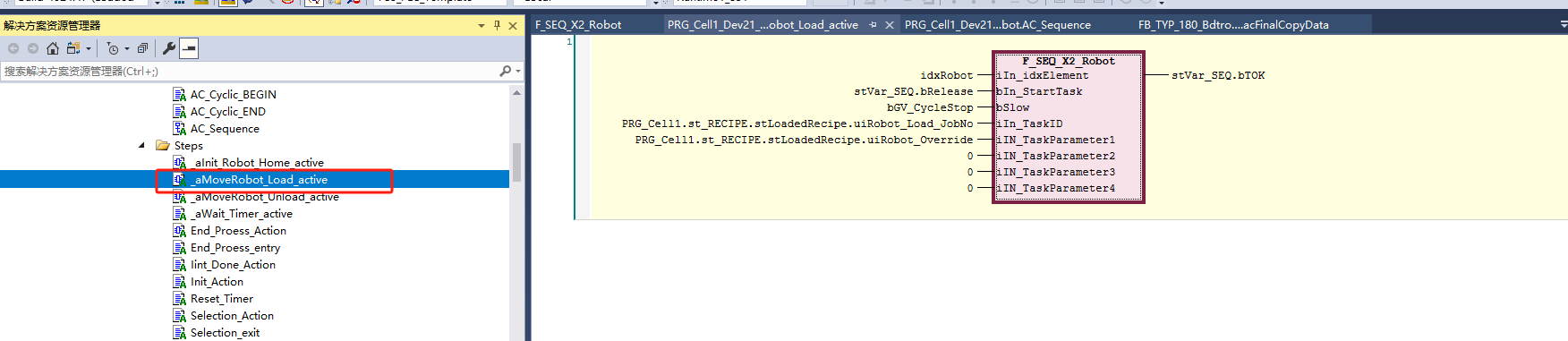
一、的FBD编程环境中的调用
二、函数变量声明
三、函数源代码
四、函数代码分析
4.1功能概述
4.2 代码拆解与逻辑分析
1. 初始化与返回值清除
2. 输入参数校验
3. 任务参数配置
4. 任务参数传递
5. 任务状态反馈
4.3 应用场景与设计模式
4.4 潜在问题与优化建议
4.5总结
一、函数实例化
一、的FBD编程环境中的调用
二、函数变量声明
FUNCTION F_SEQ_X2_Robot: BOOL(*---------------------------------------------*)
(*IN variables*)
(*---------------------------------------------*)
VAR_INPUTiIn_idxElement :INT; (* Elementnumner *)bIn_StartTask :BOOL; (* Request Element move to WP (Workposition) *)bSlow :BOOL; (* Request Element move to WP (Workposition) Slow *) iIn_TaskID :INT :=0; (* Task ID to be started *)iIN_TaskParameter1 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter2 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter3 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter4 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)END_VAR(*---------------------------------------------*)
(*IN/OUT variables*)
(*---------------------------------------------*)(*---------------------------------------------*)
(*Local Constants*)
(*---------------------------------------------*)
VAR CONSTANT
END_VAR(*---------------------------------------------*)
(*Local variables*)
(*---------------------------------------------*)
VAR
END_VAR(*---------------------------------------------*)
(*Lokal temp variables*)
(*---------------------------------------------*)
VAR
END_VAR(*All VAR_IN_OUT variables have been moved to the end of the declaration due to compatibility reasons*)
VAR_IN_OUT
END_VAR三、函数源代码
(*clear function's return value*)
F_SEQ_X2_Robot := FALSE;(*check index valid and not both inputs true*)
IF (iIn_idxElement <= 0)OR (iIn_idxElement > iGC_ELEMENTE_End)OR (iIn_TaskID =0)
THENRETURN;
END_IF;(*Set command in element structure *)
stGV_SYS_EL