温州微信网站开发青岛网站制作推广
文章目录
- 1.SOAR:异构无人机协同探索与拍摄以实现快速自主重建
- 2. RACER: 一种使用分散式无人机群进行快速协同探索的方法
- 3. 使用协作式纳米无人机在非结构化环境中进行最小感知探索
- 4.GVP-MREP:通过动态拓扑图上的 Voronoi 分区进行快速且通信高效的多无人机探索
- 5.森林的快速多无人机分散探索
1.SOAR:异构无人机协同探索与拍摄以实现快速自主重建
代码:代码
原文:原文
摘要:无人机(UAVs)在场景重建领域已获得显著关注。本文介绍了SOAR,一个专为复杂环境快速自主重建设计的LiDAR-视觉异构多无人机系统。我们的系统包括一个配备大视场(FoV)LiDAR的探索者以及配备相机的拍摄者。为确保快速获取场景表面几何信息,我们采用了一种基于表面前沿的探索策略。随着表面的逐步探索,我们识别未覆盖区域并逐步生成视点。这些视点通过解决一致多仓库多旅行商问题(Consistent-MDMTSP)分配给拍摄者,该问题在确保任务一致性的同时优化了扫描效率。最后,拍摄者利用分配的视点确定最佳覆盖路径以获取图像。我们在现实模拟器中进行了广泛的基准测试,验证了SOAR与经典及最新方法相比的性能。更多详情,请访问我们的项目页面sysu-star.github.io/SOAR
主要框架: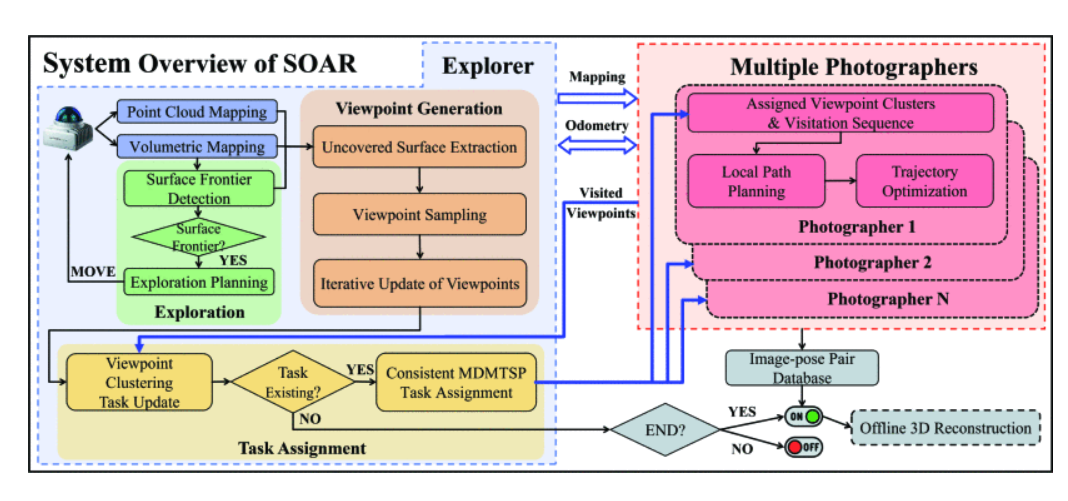
在本文中,我们提出了SOAR,一种LiDAR-视觉异构多无人机规划器,能够同时进行探索和拍摄,以实现复杂场景的快速自主重建。我们的方法结合了基于模型和无模型方法的优势。通过利用一组协作无人机,它允许在生成粗略模型的同时并行扫描对象,从而显著提高了重建过程的效率。该系统配备了一个搭载具有大感知范围的LiDAR传感器的探索无人机,能够快速获取表面几何信息。与基于模型方法中的先前模型类似,表面为进行远程视点生成和路径规划提供了丰富的信息。同时,扫描已探索表面的任务被分配给多个配备RGB相机的拍摄者,它们协作工作以实现全面的场景覆盖。随着探索者逐步获取表面信息,我们提出了一种高效的视点生成方法,能够逐步生成覆盖表面所需的最少数量的视点。然后,通过解决一致多仓库多旅行商问题(Consistent-MDMTSP),将这些视点聚类并分配给拍摄者。这个迭代过程优化了拍摄者的扫描效率,同时确保了连续任务分配的一致性。最后,每个拍摄者根据分配的聚类规划最短路径以捕获图像,利用它们作为高效图像采集的全局指导。
主要创新点:
我们在模拟中比较了我们的方法与经典和最先进的方法。结果表明,在基准场景中,我们的方法实现了更高的效率和卓越的重建质量。总之,本文的贡献总结如下:
1.一种新颖的LiDAR-视觉异构多无人机系统,能够快速高效地完成重建任务。
2.一种增量视点生成方法,随着表面信息的逐步获取,生成最少数量的视点以确保全面覆盖。
3.一种任务分配方法,迭代优化扫描效率,同时确保连续任务分配的一致性。
4.所提出的方法已在两个现实模拟环境中得到广泛验证。我们系统的源代码将会发布。

2. RACER: 一种使用分散式无人机群进行快速协同探索的方法
原文:原文
代码:代码
摘要:尽管多无人机系统(UAVs)在快速自主探索方面具有巨大潜力,但仍未受到足够的关注。在本文中,我们提出了一种基于去中心化无人机队伍的快速协同探索(RACER)方法。为了有效地调度无人机,采用基于在线网格空间分解的配对交互方法,确保所有无人机同时探索不同的区域,仅使用异步和有限的通信。此外,我们优化了未知空间的覆盖路径,并通过车辆路径规划问题将工作负载均衡分配给每个无人机。在任务分配的基础上,每个无人机不断更新覆盖路径并逐步提取关键信息来支持探索规划。分层规划器寻找探索路径,细化局部视点,并生成最短时间的轨迹以顺利安全地探索已知空间。所提出的方法被广泛评估,展现了高效的探索能力、可扩展性和在有限通信下的鲁棒性。此外,首次实现了在真实世界中完全去中心化的多无人机协同探索。我们将发布我们在现实世界中的开源实现。


图. 我们的多旋翼自主探索系统概述,包括感知、协调和探索规划模块。
在本文中,我们提出了一种系统的去中心化协调和规划方法,以实现快速协同探索,该方法考虑了上述提到的困难,如图1所示。为了有效地协调四旋翼无人机,整个未知空间不断在线细分为网格,并通过配对交互将其分配给各个四旋翼。该方法仅需要异步和不可靠的通信,仅通过相邻四旋翼之间的通信即可,确保四旋翼同时探索不同的区域而不相互干扰。此外,还提出了一种容量约束的车辆路径规划(CVRP)问题公式,以实现更高效的协作。它最小化了多个全局覆盖路径(CP)的长度,并平衡了分配给每个四旋翼的工作负载,有效防止了重复探索和不公平的工作负载分配。在任务分配的基础上,每个四旋翼不断更新其CP,提供有效的全局路径来探索未知空间。在CP的指导下,分层规划器找到局部路径,细化视点,并生成最短时间轨迹,依次进行快速探索。整个系统计算开销低且具备可扩展性,能够使团队快速响应环境变化,从而持续进行快速探索。本文的贡献总结如下:
- 基于在线网格分解的配对交互方法,将未知空间的位置细分,确保四旋翼无人机只通过异步和有限的通信共同探索不同的区域。
- 一种最小化全局覆盖路径(CP)长度并平衡分配给每个四旋翼的工作负载的CVRP公式。它进一步增强了四旋翼队伍之间的协作。
- 从[1]扩展的分层探索规划器,结合全局覆盖路径的引导,从而提高探索效率。规划器中还集成了互相避碰机制。
- 我们将所提出的方法与多机器人状态估计结合,实现了完全自主探索,并在具有挑战性的现实环境中进行实验。我们将发布我们的系统源代码。
3. 使用协作式纳米无人机在非结构化环境中进行最小感知探索
原文:原文
代码:代码
摘要:近年来的研究进展显著提升了在受限载荷条件下的自主导航与建图能力,但现有的多机器人检查算法并不适用于纳米无人机,原因在于其需要高性能传感器和高计算资源。为了解决这些问题,我们提出了一种名为 ExploreBug 的混合型前沿追踪算法,该算法专为处理纳米无人机群的受限感知能力而设计。该系统包括三个主要模块:建图子系统、探索子系统和导航子系统。此外,还集成了一个群体内的碰撞避免系统以防止无人机间的碰撞。我们通过广泛的模拟实验和实际环境的探索实验验证了该方法的有效性,实验中最多使用了七架无人机进行模拟,三架无人机在实际环境中进行了测试。实验涵盖了多种障碍物配置,导航速度最高达 0.75 m/s。实验结果证明,该算法能够以最少的感知信息完成探索任务,适用于不同的无人机尺寸和障碍物密度。此外,我们的前沿分配启发式方法确保了群体内探索区域和飞行路径的均匀分布。
我们公开了所提系统的源代码,以促进在基于自主纳米无人机的建图与探索领域的进一步发展。
简介:
在这项工作中,我们提出了 ExploreBug,一种专为纳米无人机设计的协调算法,旨在利用最小感知实现高效的全环境探索。与该领域的最新研究相比,这些研究优先考虑探索时间和速度,而我们的方法则采取了根本不同的方向:我们专注于“更小”,而不是“更复杂”。我们的目标是通过将现有技术改编到更小、更受资源限制的平台上,并严格评估性能与最小传感器输入之间的权衡,推动现有技术的边界。
简而言之,这项工作的主要贡献如下:
-
设计了一种新颖的探索算法,该算法能够有效利用最小的感知能力——仅需四个单束距离传感器——专为纳米无人机量身定制。
-
通过模拟和真实环境中广泛的实验评估了所提出方法的性能,尽管存在硬件限制,实验结果依然表现出良好的前景。
-
最后,我们将所提出系统的代码和框架开源,帮助研究人员进行评估和基于我们的框架开展进一步的研究。
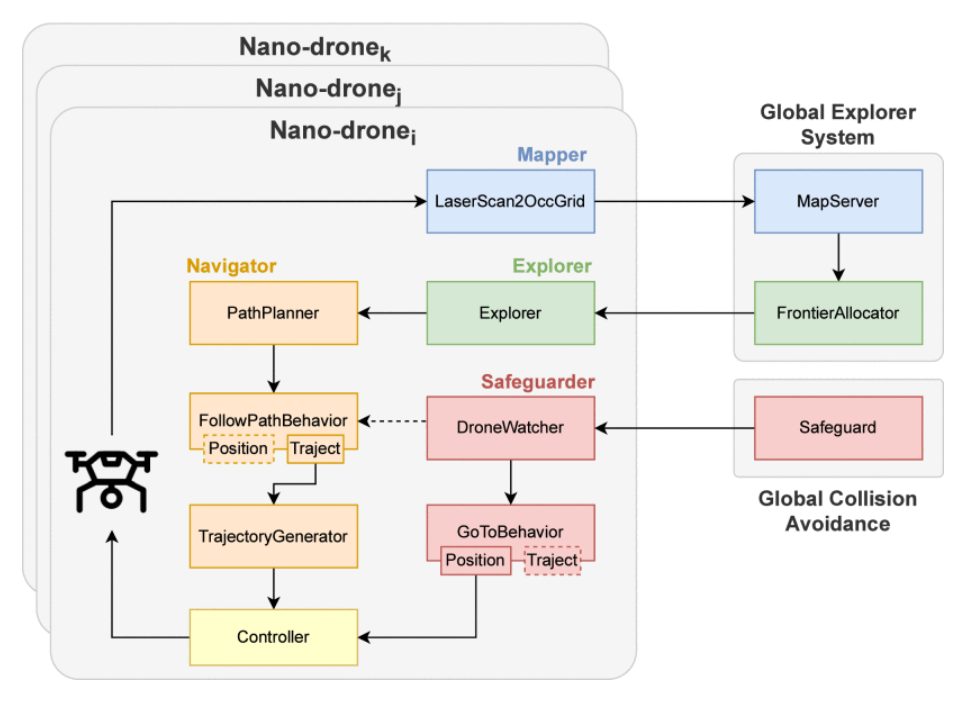
该系统由三个主要模块组成:建图子系统、探索子系统和导航子系统,每个模块对应任务的特定阶段。如图 2 所示,展示了整个流程的概述。在建图阶段,每个无人机通过群体共享的多传感器读取数据,创建一个公共地图。由于传感器仅能收集环境的二维信息,地图以占据栅格的形式编码。探索阶段包括三个步骤:探索策略、前沿生成和前沿分配。探索策略采用了一种混合型前沿追踪算法。随后,从地图中生成了一组可用的前沿区域,并根据无人机群的状态,按需将最合适的前沿区域分配给每个无人机。最后,导航子系统向控制器发送运动参考,以到达目标点。导航系统的核心组件是一个本地路径规划器,该规划器利用 Aerostack2 [20] 框架开发,用于构建自主飞行机器人系统。Aerostack2 支持高层次机器人行为抽象,例如导航到路径点、悬停或起飞,从而简化无人机的运动控制。为了防止无人机之间的碰撞,还设计了一个群体内的碰撞避免子系统。该子系统通过跟踪每架无人机的位置提供安全保障,当检测到潜在碰撞时,相关无人机的运动会暂时停止,直到安全状态恢复为止。安全状态重新建立后,系统会恢复常规操作。
4.GVP-MREP:通过动态拓扑图上的 Voronoi 分区进行快速且通信高效的多无人机探索
代码:github
原文:原文
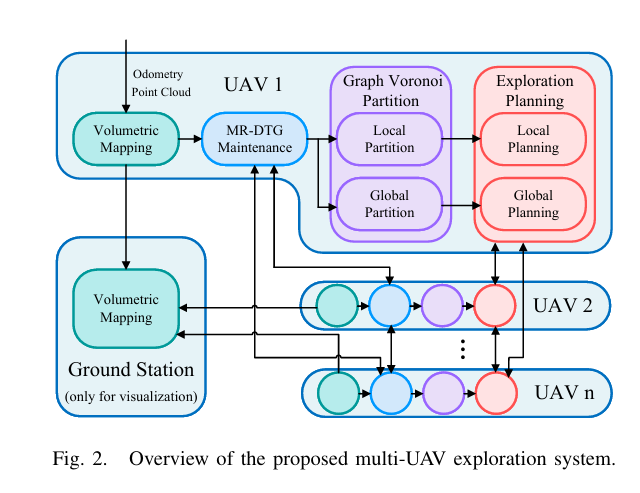
摘要:高效的数据传输和合理的任务分配对提高多无人机探索效率至关重要。然而,大多数通信数据类型通常包含冗余信息,这需要传输大量通信数据。此外,探索导向的任务分配并非易事,尤其是在资源受限的小型无人机(UAVs)场景中面临更大挑战。在本文中,我们提出了一种快速且通信高效的多无人机探索方法,用于大规模环境探索。我们首先设计了一个多机器人动态拓扑图(MR-DTG),由表示已探索区域和连接区域的节点与边组成。在 MR-DTG 的支持下,该方法通过仅传输探索规划所需的必要信息实现高效通信。为了进一步提高探索效率,提出了一种分层多无人机探索方法。具体来说,通过 图的 Voronoi 分割 将 MR-DTG 的节点分配给这些无人机,以考虑实际的运动成本,从而实现合理的任务分配。据我们所知,这是首次采用 图的 Voronoi 分割 处理多无人机探索任务。提出的方法在模拟中与当前最先进方法进行了对比,结果表明该方法可以将探索时间和通信量分别减少 38.3% 和 95.5%。最后,我们在真实环境下使用 6 架无人机验证了该方法的有效性。我们将公开该方法的源代码以造福研究社区。
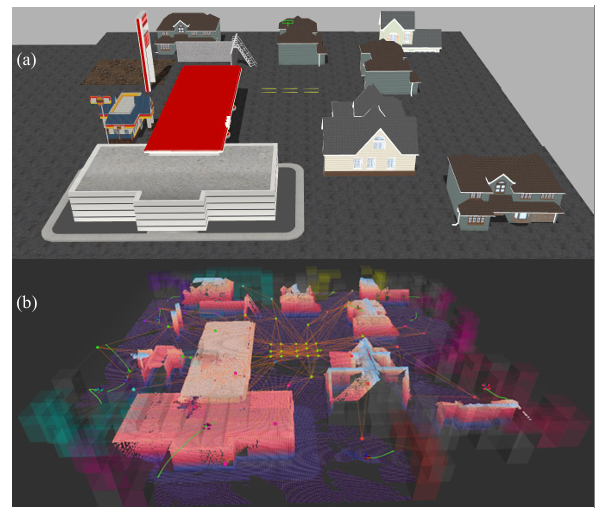

图 1. 所提出的多无人机探索方法的一个实例,其中 15 架无人机使用 MR-DTG 探索环境。
(a) 城市场景的模拟环境。
(b) 使用所提出方法的探索结果。
点表示历史节点,立方体表示可探索区域。历史节点的颜色对应于全局分区期间分配给它们的无人机,可探索区域的颜色对应于局部分区期间分配给它们的无人机。
5.森林的快速多无人机分散探索
代码:github
原文:原文
摘要:高效的探索策略在搜索救援任务和灾害调查等任务中至关重要。无人机(UAVs)在此类应用中变得尤为流行,因其能够以较高速度覆盖大面积区域。然而,随着车载无人机设备能力的不断提高,研究的重点逐渐转向多无人机任务的高级推理。尽管如此,对于以前未知的大空间区域的自主导航和探索仍然是一项开放性挑战,尤其是在环境复杂、障碍物密集且由于高障碍密度导致频繁遮挡的情况下,例如森林场景。此外,在此类场景中,无人机群的长距离无线通信问题可能成为一个限制因素,尤其是在实现无人机群导航自动化时。基于此,本研究提出了一种探索策略,该策略使多个无人机能够以分布式方式快速探索复杂场景。通过为每架无人机提供决策能力以在不同执行模式之间切换,所提出的方法在完全未知区域的谨慎探索与未知空间大规模区域的更激进探索之间实现了良好的平衡。实验结果表明,该方法在多无人机设置下对森林区域的完全覆盖速度比当前最先进方法快 30%。
主要创新点:
- 设计了一种多机器人分布式探索策略,能够在谨慎探索和已探索地图的积极开发之间实现有效平衡;
- 在模拟中进行了广泛评估,证明了比当前最先进方法更好的性能;
- 公开了所提出系统的源代码。
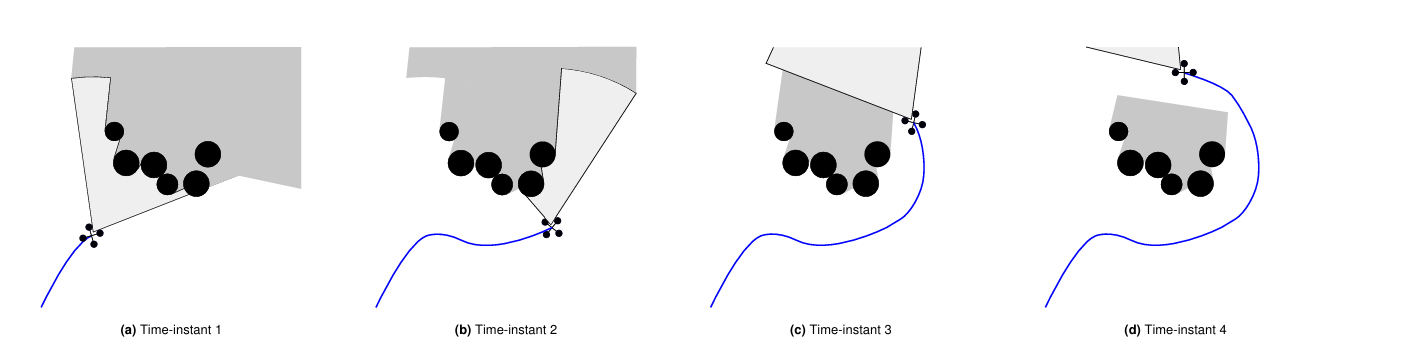 图 2: 一个示例图,展示了基于贪婪前沿的探索方法在不同时间点的不足之处,即产生被自由区域包围的未知空间孤岛。机器人视野被表示为由黑色实线限定的浅灰色阴影区域,而障碍物和未探索区域分别用黑色和深灰色表示。机器人向最有信息量的前沿移动(b);然而,由于传感器范围有限,被障碍物遮挡的空间未被清除(c)。因此,由于探索过程倾向于更大的、更有信息量的前沿,初级规划器会忽略较小的未探索空间部分(如深灰色显示的区域 d)。
图 2: 一个示例图,展示了基于贪婪前沿的探索方法在不同时间点的不足之处,即产生被自由区域包围的未知空间孤岛。机器人视野被表示为由黑色实线限定的浅灰色阴影区域,而障碍物和未探索区域分别用黑色和深灰色表示。机器人向最有信息量的前沿移动(b);然而,由于传感器范围有限,被障碍物遮挡的空间未被清除(c)。因此,由于探索过程倾向于更大的、更有信息量的前沿,初级规划器会忽略较小的未探索空间部分(如深灰色显示的区域 d)。

图 3: 管道概览,该任务旨在协调一组无人机协同构建感兴趣区域的地图。通过交换里程计和地图信息,以及当前的执行模式和目标位置,以分配感兴趣区域来实现协调。每个机器人通过深度测量和通信范围内的其他机器人传递的地图块生成环境的三维网格地图。在下一步中,前沿被提取和聚类。前沿的路径被识别,并用于为代理选择合适的探索模式。接下来选择下一个目标位置,并使用文献 [24] 生成前往目标的轨迹,同时避免与场景和其他无人机发生碰撞。