小程序网站建设市场调研报告模板
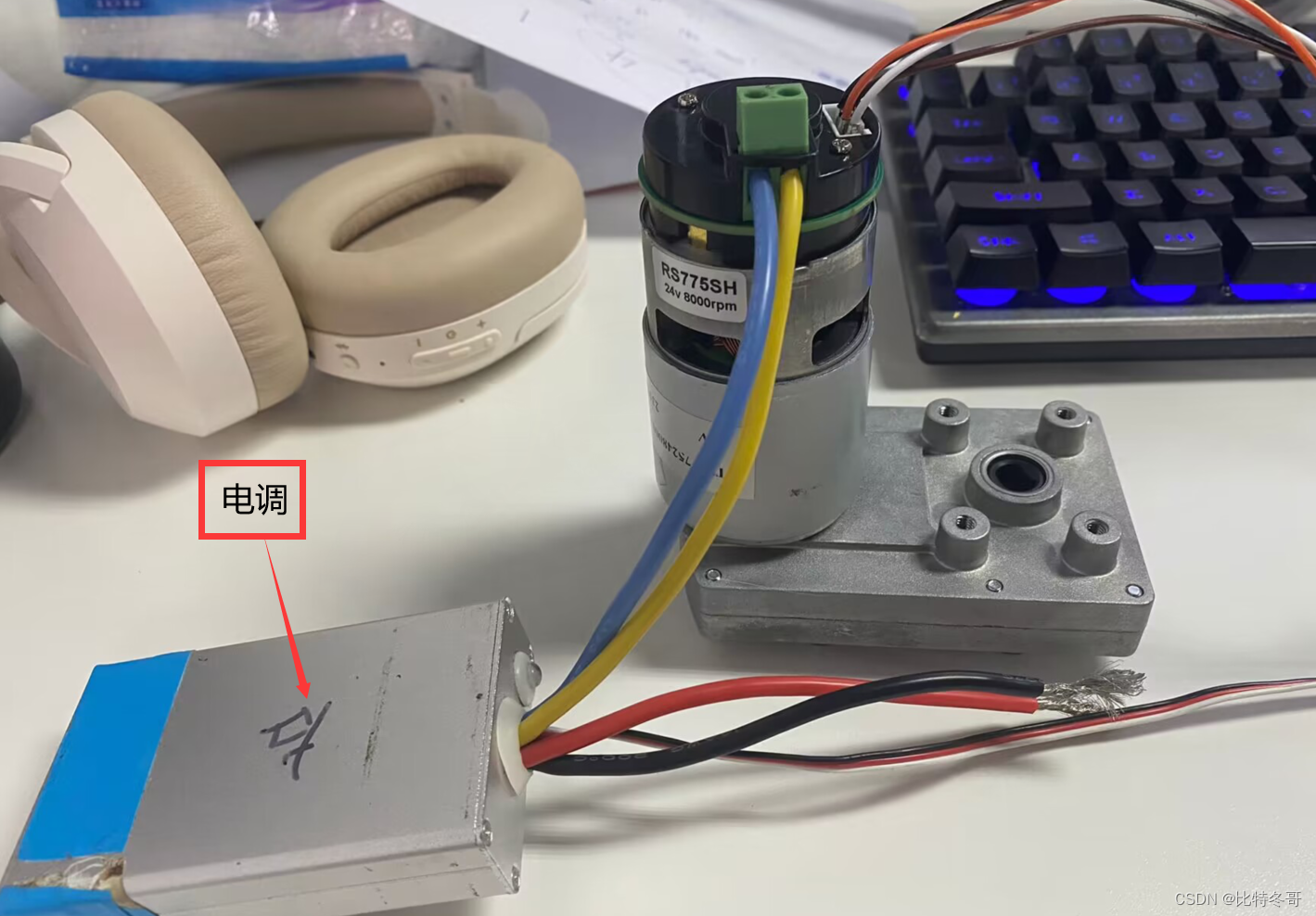
本节介绍的是一个举升电机,顾名思义,通过转轴控制物体升降,为双通道磁性译码器,利用电调进行操控,具体驱动类似于大学期间最大众的SG180°舵机,在一定的频率下,通过调制脉宽进行控制。
设备介绍
-
具体实控
例如在50Hz情况下,即周期为20ms
①驱动信号区间: 区间一(0.5ms-1.5ms )和区间二(1.5ms-2.5ms ) (注意都是开区间且存在死区)
②其中区间一和区间二分别表示不同的方向运动,例区间一表示正方向,则区间二表示反方向。
③旋转速度呈现为“ V ” 字形,即0.5ms和2.5ms分别表示为正反方向的最快速度,1.5ms左右分别表示正反方向的最慢速度。其中小于等于0.5ms时、1.5ms时和大于等于2.5ms时电机都保持停转状态。 -
电调引线
再看电调引线,可注意 分别有7根线,如上图,其中粗线有四根,红黑两根线为电源线,这里接24V,还有两根黄蓝接电机,控制电机不同转向;细线有三根,分别是红黑白,其中红黑为电源线,输出5V,可选择是否需要给MCU供电,黑线接地,白色线为PWM信号输入线,接收MCU发过来的信号进而控制电机转动。 -
电机引线
如上图,电机有6根线,跟大众使用的编码器电机无差别,两根电机引线+两根编码器电源线+AB相 -
PID
由于前几节中已介绍pwm的基本使用,这里就不再介绍,下面我直接介绍我的PID设计
①首先在主函数中对PID进行初始化,即设置目标数、比例积分微分常数、输出限幅、积分限幅。
②在定时器中断中对旋转产生的脉冲进行采样,然后进行PID运算,将输出信号传入电调。
③在P、I、D参数调节中,我习惯先调I,将P和D置0,从小–>大调,观察电机变化,这里我使用的是一个上位机软件VOFA,串口协议,通过上传指定数据,可以很好的观察波形变化,可发现 它呈现出一个缓慢上升的波形,这时可以对I进行放大,加快上升速度,我的调节是:调至I能很好的达到目标点,且在第一次达到目标点时,可以让它超出适量值,再对比左右部分数值,发现这个点的I值达到目标点的速度更快,则这个点就是我要的I值。然后再对P进行调节,也可以选择从小–>大调,P可以很好的反馈出控制器对电机的控制速度,即加大对目标值的反应,具体调节方法同I。最后在对D进行调节(对于一般的控制,PI两个参数足以满足需求,如果最后完美,可再选择D),D表现为误差变化率的变化,可以抑制电机的超调等,对于D,你可以用某物体人为的阻挡电机转动,观察电机变化,例如你提供足够大的阻力,电机肯定会直接拉满,这时观察电机再次回到目标点的时间。
软件设计
- 1. 设备初始化
/************************** Uart ************************************/
void Uart_Init(void)
{char str[] = "hello RT-Thread!\r\n";/* step1:查找串口设备 */serial = rt_device_find(SAMPLE_UART_NAME);/* step2:修改串口配置参数 */config.baud_rate = BAUD_RATE_115200; //修改波特率为 115200config.data_bits = DATA_BITS_8; //数据位 8config.stop_bits = STOP_BITS_1; //停止位 1config.bufsz = 128; //修改缓冲区 buff size 为 128config.parity = PARITY_NONE; //无奇偶校验位/* step3:控制串口设备。通过控制接口传入命令控制字,与控制参数 */rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);/* step4:打开串口设备。以中断接收及轮询发送模式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
}/************************** Timer ************************************/
void Timer_Init(void)
{rt_hwtimer_mode_t mode; /* 定时器模式 */rt_hwtimerval_t timeout_s; /* 定时器超时值 */rt_uint32_t freq = 1000000; /* 计数频率 */// 使用前必须先手动打开时钟__HAL_RCC_TIM3_CLK_ENABLE();/* 查找定时器设备 */hw_dev = rt_device_find(HWTIMER_DEV_NAME);if (hw_dev == RT_NULL){rt_kprintf("hwtimer sample run failed! can't find %s device!\n", HWTIMER_DEV_NAME);}/* 以读写方式打开设备 */rt_err_t ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);if (ret != RT_EOK){rt_kprintf("open %s device failed!\n", HWTIMER_DEV_NAME);}/* 设置超时回调函数 */rt_device_set_rx_indicate(hw_dev, Timer3_Out);/* 设置计数频率(若未设置该项,默认为1Mhz 或 支持的最小计数频率) */rt_device_control(hw_dev, HWTIMER_CTRL_FREQ_SET, &freq);/* 设置模式为周期性定时器(若未设置,默认是HWTIMER_MODE_ONESHOT)*/mode = HWTIMER_MODE_PERIOD;ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);if (ret != RT_EOK){rt_kprintf("set mode failed! ret is :%d\n", ret);}/* 设置定时器超时值为2s并启动定时器 */timeout_s.sec = 0; /* 秒 */timeout_s.usec = 40000; /* 微秒 */if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s)){rt_kprintf("set timeout value failed\n");}
}/************************** PWM ************************************/
void PWM_Init(void)
{/* 查找设备 */pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);if (pwm_dev == RT_NULL){rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);}/* 使能设备 */rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL1);/* 设置PWM周期和脉冲宽度 */rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL1, period, pulse);
}/************************** Encoder ************************************/
void Encoder_Init(void)
{/* 查找脉冲编码器设备 */pulse_encoder_dev = rt_device_find(PULSE_ENCODER_DEV_NAME);if (pulse_encoder_dev == RT_NULL){rt_kprintf("pulse encoder sample run failed! can't find %s device!\n", PULSE_ENCODER_DEV_NAME);}/* 以只读方式打开设备 */rt_err_t ret = rt_device_open(pulse_encoder_dev, RT_DEVICE_OFLAG_RDONLY);if (ret != RT_EOK){rt_kprintf("open %s device failed!\n", PULSE_ENCODER_DEV_NAME);}
}
- 2. 以下为位置式PID计算,可供参考
PID_VAR_TYPE Position_PID_Cal(PID * s_PID,PID_VAR_TYPE now_point)
{s_PID->LastResult = s_PID->Result; // 简单赋值运算//误差计算s_PID->Error = s_PID->SetPoint - now_point;s_PID->SumError += s_PID->Error; //积分误差累加//积分限幅PID_VAR_TYPE IOutValue = s_PID->SumError * s_PID->Integral;if(IOutValue > s_PID->IntegralMax)IOutValue = s_PID->IntegralMax;else if(IOutValue < s_PID->IntegralMin)IOutValue = s_PID->IntegralMin;//PID计算s_PID->Result = s_PID->Proportion * s_PID->Error // 比例项+ IOutValue // 积分项+ s_PID->Derivative * (s_PID->Error - s_PID->LastError); // 微分项s_PID->PrevError = s_PID->LastError; // 简单赋值运算s_PID->LastError = s_PID->Error; // 简单赋值运算//输出限幅if(s_PID->Result > s_PID->OutMax)s_PID->Result = s_PID->OutMax;else if(s_PID->Result < s_PID->OutMin)s_PID->Result = s_PID->OutMin;return s_PID->Result;
}
- 3. VOFA
正如上面所介绍的一个上位机软件,可观察PID波形变化,协助开发,具体协议如下所示:
void SendDatatoVoFA(rt_uint8_t byte[],float v_real)
{rt_uint8_t t_test=0;//四位发送rt_uint8_t send_date[4]={0};//发送数据Float_to_Byte(v_real,byte); //类型转换for(t_test=0;t_test<4;t_test++){rt_device_write(serial, 0, &byte[t_test], 1);}send_date[0]=0X00;send_date[1]=0X00;send_date[2]=0X80;send_date[3]=0X7f;for(t_test=0;t_test<4;t_test++){rt_device_write(serial, 0, &send_date[t_test], 1);}
}
- 4. 在定时器中断不断进行PID计算,并输出PWM信号
static rt_err_t Timer3_Out(rt_device_t dev, rt_size_t size)
{ rt_device_read(pulse_encoder_dev, 0, &count, 1); /* 读取脉冲编码器计数值 */rt_int32_t out=Position_PID_Cal(&pid1,count);rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL1, period, out);rt_kprintf("%d - %d\n",count,out);SendDatatoVoFA(byte,count); //发送到vofa上位机,查看波形rt_device_control(pulse_encoder_dev, PULSE_ENCODER_CMD_CLEAR_COUNT, RT_NULL);/* 清空脉冲编码器计数值 */return 0;
}