番禺品牌型网站建设推广软文案例
目录
六、I2C总线二级外设驱动开发方法
七、I2C总线二级外设驱动开发之名称匹配
1. i2c_register_board_info
2. i2c_new_device:明确二级外设地址的情况下可用
3. i2c_new_probed_device
八、I2C总线二级外设驱动开发之设备树匹配
六、I2C总线二级外设驱动开发方法
1. 查阅原理图以便得知二级外设挂在哪条I2C总线上、二级外设的身份标识(二级外设自身的地址)
2. 参照platform样式搭建二级外设驱动框架
3. 查询二级外设芯片手册以便得知驱动需要用到的寄存器地址
注意:
(1) 此处寄存器是指二级外设内部的寄存器,每个寄存器在芯片手册里有个对应编号(也被称为地址),但不是内存地址,特别提醒此寄存器不是SOC芯片内部参与内存统一编址的寄存器,更不是ARM核-CPU的寄存器
(2)通过调用i2c_tranfer函数完成与相应寄存器的数据交互
4. 参照字符驱动完成其余代码编写
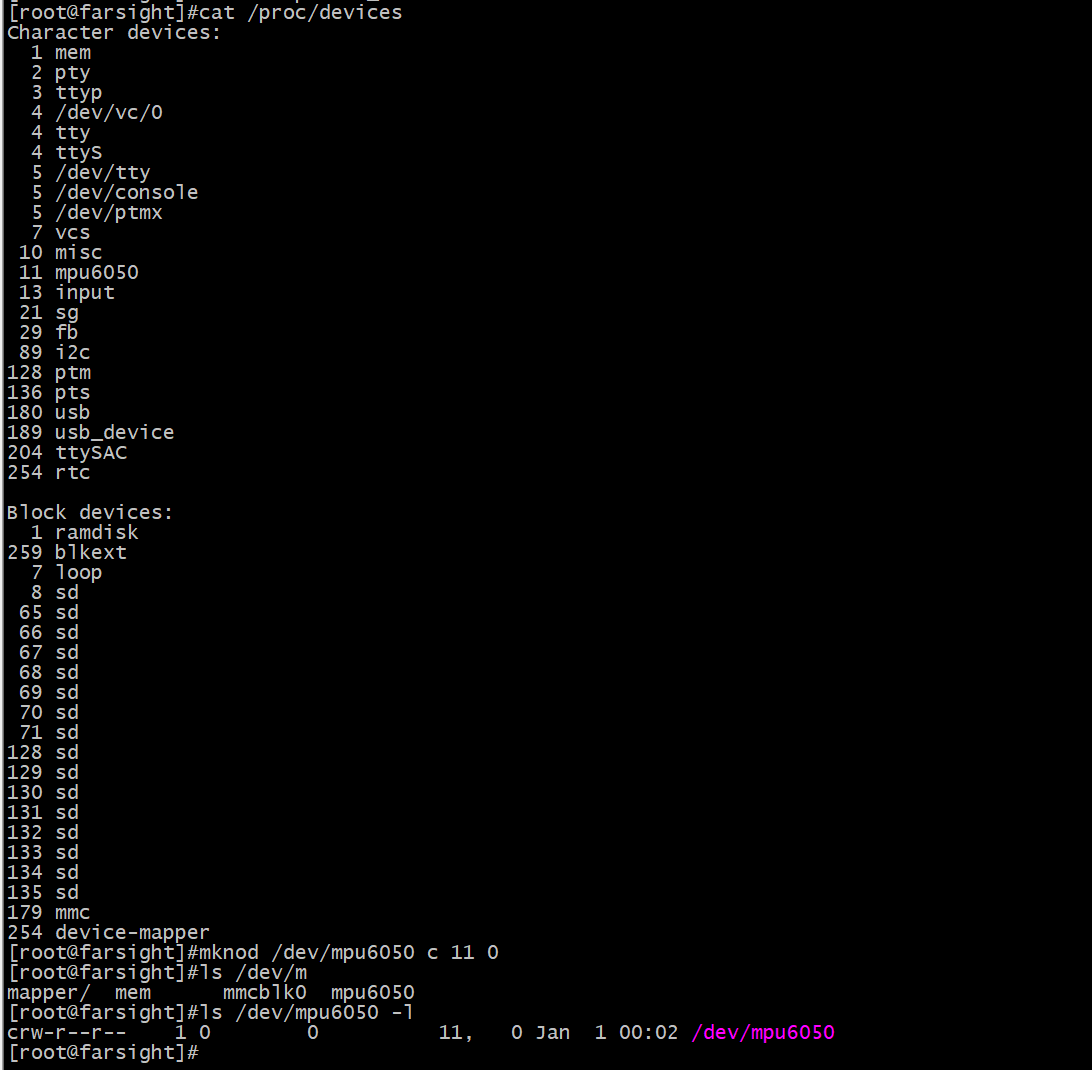
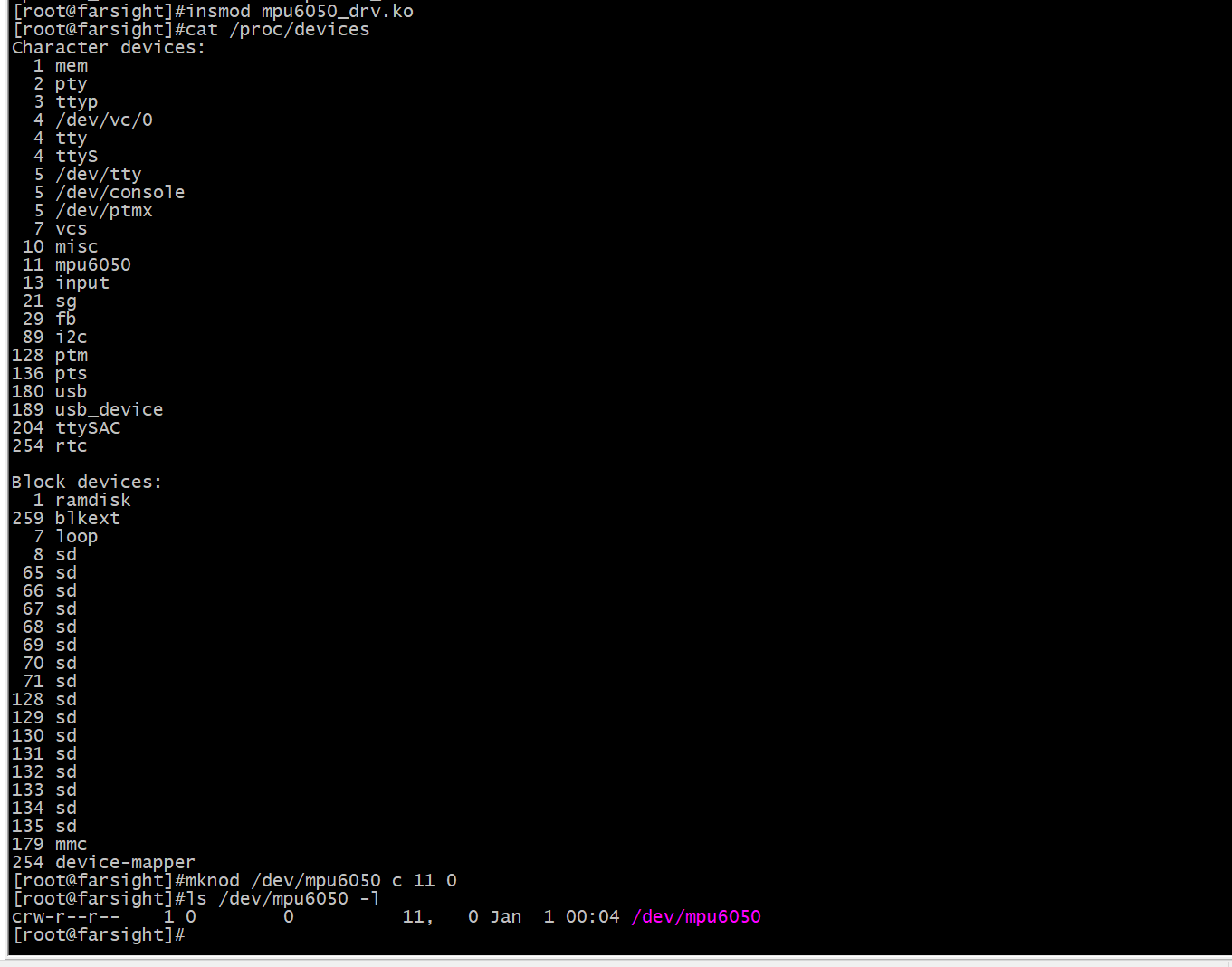
5. 创建对应的i2c_client对象
linux-3.14\Documentation\i2c\instantiating-devices
匹配方式:
1. 名称匹配(id和name差不多)
2. 设备树匹配
3. ACPI匹配
Advanced Configuration and Power Management Interface 高级配置和电源管理接口
PC机平台采用的一种硬件配置接口
(咱们是arm平台这种方式用不了)
i2c二级外设驱动框架:
```c//其它struct file_operations函数实现原理同硬编驱动static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid){//做硬编驱动模块入口函数的活}static int mpu6050_remove(struct i2c_client *pclt){//做硬编驱动模块出口函数的活}/*名称匹配时定义struct i2c_device_id数组*/static struct i2c_device_id mpu6050_ids ={{"mpu6050",0},//.....{}};/*设备树匹配时定义struct of_device_id数组*/static struct of_device_id mpu6050_dts ={{.compatible = "invensense,mpu6050"},//....{}};/*通过定义struct i2c_driver类型的全局变量来创建i2c_driver对象,同时对其主要成员进行初始化*/struct i2c_driver mpu6050_driver ={.driver = {.name = "mpu6050",.owner = THIS_MODULE,.of_match_table = mpu6050_dts,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids,};/*以下其实是个宏,展开后相当于实现了模块入口函数和模块出口函数*/module_i2c_driver(mpu6050_driver);MODULE_LICENSE("GPL");```
七、I2C总线二级外设驱动开发之名称匹配
这种匹配方式需要自己创建i2c_client对象
创建i2c_client对象有三种方式:
1. i2c_register_board_info
1.当开发板上电内核跑起来的时候,肯定是架构相关的程序首先运行,也就是mach-xxx.c
2. mach-xxx.c文件里首先会定义i2c_board_info的结构体数组,在mach-xxx.c的初始化函数里调用i2c_register_board_info函数把i2c_board_inifo链接进内核的i2c_board_list链表当中去
3.在驱动i2c目录下和开发板板对应的驱动文件i2c-xxx.c里,创建i2c_adapter对象
4.这种方式严重依赖平台,缺乏灵活性,基本会被遗弃
2. i2c_new_device:明确二级外设地址的情况下可用
i2c二级外设client框架:
```c#include <linux/kernel.h>#include <linux/module.h>#include <linux/i2c.h>static struct i2c_board_info mpu6050_info ={I2C_BOARD_INFO("mpu6050",二级外设地址) };static struct i2c_client *mpu6050_client;static int __init mpu6050_dev_init(void){struct i2c_adapter *padp = NULL;padp = i2c_get_adapter(i2c通道编号);mpu6050_client = i2c_new_device(padp,&mpu6050_info);i2c_put_adapter(padp);return 0;}module_init(mpu6050_dev_init);static void __exit mpu6050_dev_exit(void){i2c_unregister_device(mpu6050_client);}module_exit(mpu6050_dev_exit);MODULE_LICENSE("GPL");```
3. i2c_new_probed_device
i2c二级外设client框架:不明确二级外设地址,但是知道是可能几个值之一的情况下可用
```c#include <linux/kernel.h>#include <linux/module.h>#include <linux/i2c.h>static const unsigned short addr_list[] ={0x68,//.....I2C_CLIENT_END};static struct i2c_client *mpu6050_client;static int __init mpu6050_dev_init(void){struct i2c_adapter *padp = NULL;struct i2c_board_info mpu6050_info = {""};strcpy(mpu6050_info.type,"mpu6050");padp = i2c_get_adapter(i2c通道编号);mpu6050_client = i2c_new_probed_device(padp,&mpu6050_info,addr_list,NULL);i2c_put_adapter(padp);if(mpu6050_client != NULL){return 0;}else{return -ENODEV;}}module_init(mpu6050_dev_init);static void __exit mpu6050_dev_exit(void){i2c_unregister_device(mpu6050_client);}module_exit(mpu6050_dev_exit);MODULE_LICENSE("GPL");```
 mpu6050_client.c
mpu6050_client.c
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>static struct i2c_board_info mpu6050_info =
{I2C_BOARD_INFO("mpu6050",0x68)
};static struct i2c_client *gpmpu6050_client = NULL;static int __init mpu6050_client_init(void)
{struct i2c_adapter *padp = NULL;padp = i2c_get_adapter(5);gpmpu6050_client = i2c_new_device(padp,&mpu6050_info);i2c_put_adapter(padp);return 0;
}static void mpu6050_client_exit(void)
{i2c_unregister_device(gpmpu6050_client);
}module_init(mpu6050_client_init);
module_exit(mpu6050_client_exit);
MODULE_LICENSE("GPL");
mpu6050_drv.c
#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/i2c.h> #include <linux/cdev.h> #include <linux/wait.h> #include <linux/sched.h> #include <linux/poll.h> #include <linux/slab.h> #include <linux/mm.h> #include <linux/io.h> #include <asm/uaccess.h> #include <asm/atomic.h>#include "mpu6050.h"#define SMPLRT_DIV 0x19 #define CONFIG 0x1A #define GYRO_CONFIG 0x1B #define ACCEL_CONFIG 0x1C#define ACCEL_XOUT_H 0x3B #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40 #define TEMP_OUT_H 0x41 #define TEMP_OUT_L 0x42 #define GYRO_XOUT_H 0x43 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6Bint major = 11; int minor = 0; int mpu6050_num = 1;struct mpu6050_dev {struct cdev mydev;struct i2c_client *pclt;};struct mpu6050_dev *pgmydev = NULL;int mpu6050_read_byte(struct i2c_client *pclt,unsigned char reg) {int ret = 0;char txbuf[1] = {reg};char rxbuf[1] = {0};struct i2c_msg msg[2] = {{pclt->addr,0,1,txbuf},{pclt->addr,I2C_M_RD,1,rxbuf}};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_read_byte\n",ret);return ret;}return rxbuf[0]; }int mpu6050_write_byte(struct i2c_client *pclt,unsigned char reg,unsigned char val) {int ret = 0;char txbuf[2] = {reg,val};struct i2c_msg msg[1] = {{pclt->addr,0,2,txbuf},};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_write_byte\n",ret);return ret;}return 0; }int mpu6050_open(struct inode *pnode,struct file *pfile) {pfile->private_data =(void *) (container_of(pnode->i_cdev,struct mpu6050_dev,mydev));return 0; }int mpu6050_close(struct inode *pnode,struct file *pfile) {return 0; }long mpu6050_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg) {struct mpu6050_dev *pmydev = (struct mpu6050_dev *)pfile->private_data;union mpu6050_data data;switch(cmd){case GET_ACCEL:data.accel.x = mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_L);data.accel.x |= mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_H) << 8;data.accel.y = mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_L);data.accel.y |= mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_H) << 8;data.accel.z = mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_L);data.accel.z |= mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_H) << 8;break;case GET_GYRO:data.gyro.x = mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_L);data.gyro.x |= mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_H) << 8;data.gyro.y = mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_L);data.gyro.y |= mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_H) << 8;data.gyro.z = mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_L);data.gyro.z |= mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_H) << 8;break;case GET_TEMP:data.temp = mpu6050_read_byte(pmydev->pclt,TEMP_OUT_L);data.temp |= mpu6050_read_byte(pmydev->pclt,TEMP_OUT_H) << 8;break;default:return -EINVAL;}if(copy_to_user((void *)arg,&data,sizeof(data))){return -EFAULT;}return sizeof(data); }void init_mpu6050(struct i2c_client *pclt) {mpu6050_write_byte(pclt,PWR_MGMT_1,0x00);mpu6050_write_byte(pclt,SMPLRT_DIV,0x07);mpu6050_write_byte(pclt,CONFIG,0x06);mpu6050_write_byte(pclt,GYRO_CONFIG,0xF8);mpu6050_write_byte(pclt,ACCEL_CONFIG,0x19); }struct file_operations myops = {.owner = THIS_MODULE,.open = mpu6050_open,.release = mpu6050_close,.unlocked_ioctl = mpu6050_ioctl, };static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid) {int ret = 0;dev_t devno = MKDEV(major,minor);/*申请设备号*/ret = register_chrdev_region(devno,mpu6050_num,"mpu6050");if(ret){ret = alloc_chrdev_region(&devno,minor,mpu6050_num,"mpu6050");if(ret){printk("get devno failed\n");return -1;}major = MAJOR(devno);//容易遗漏,注意}pgmydev = (struct mpu6050_dev *)kmalloc(sizeof(struct mpu6050_dev),GFP_KERNEL);if(NULL == pgmydev){unregister_chrdev_region(devno,mpu6050_num);printk("kmalloc failed\n");return -1;}memset(pgmydev,0,sizeof(struct mpu6050_dev));pgmydev->pclt = pclt;/*给struct cdev对象指定操作函数集*/ cdev_init(&pgmydev->mydev,&myops);/*将struct cdev对象添加到内核对应的数据结构里*/pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,mpu6050_num);init_mpu6050(pgmydev->pclt);return 0; }static int mpu6050_remove(struct i2c_client *pclt) {dev_t devno = MKDEV(major,minor);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,mpu6050_num);kfree(pgmydev);pgmydev = NULL;return 0; }struct i2c_device_id mpu6050_ids[] = {{"mpu6050",0},{} };struct i2c_driver mpu6050_driver = {.driver = {.name = "mpu6050",.owner = THIS_MODULE,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids, };#if 0 int __init mpu6050_driver_init(void) {i2c_add_driver(&mpu6050_driver); }void __exit mpu6050_driver_exit(void) {i2c_del_driver(&mpu6050_driver); } module_init(mpu6050_driver_init); module_exit(mpu6050_driver_exit); #else module_i2c_driver(mpu6050_driver); #endifMODULE_LICENSE("GPL");
#ifndef MPU_6050_H
#define MPU_6050_Hstruct accel_data
{unsigned short x;unsigned short y;unsigned short z;
};
struct gyro_data
{unsigned short x;unsigned short y;unsigned short z;
};union mpu6050_data
{struct accel_data accel;struct gyro_data gyro;unsigned short temp;
};#define MPU6050_MAGIC 'K'#define GET_ACCEL _IOR(MPU6050_MAGIC,0,union mpu6050_data)
#define GET_GYRO _IOR(MPU6050_MAGIC,1,union mpu6050_data)
#define GET_TEMP _IOR(MPU6050_MAGIC,2,union mpu6050_data)#endif使用probed也行
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>static unsigned short mpu6050_addr_list[] =
{0x68,0x69,I2C_CLIENT_END
};static struct i2c_client *gpmpu6050_client = NULL;static int __init mpu6050_client_init(void)
{struct i2c_adapter *padp = NULL;struct i2c_board_info mpu6050_info = {""};strcpy(mpu6050_info.type,"mpu6050");padp = i2c_get_adapter(5);gpmpu6050_client = i2c_new_probed_device(padp,&mpu6050_info,mpu6050_addr_list,NULL);i2c_put_adapter(padp);if(gpmpu6050_client != NULL){return 0;}else{return -ENODEV;}
}static void mpu6050_client_exit(void)
{i2c_unregister_device(gpmpu6050_client);
}module_init(mpu6050_client_init);
module_exit(mpu6050_client_exit);
MODULE_LICENSE("GPL");测试用的APP
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
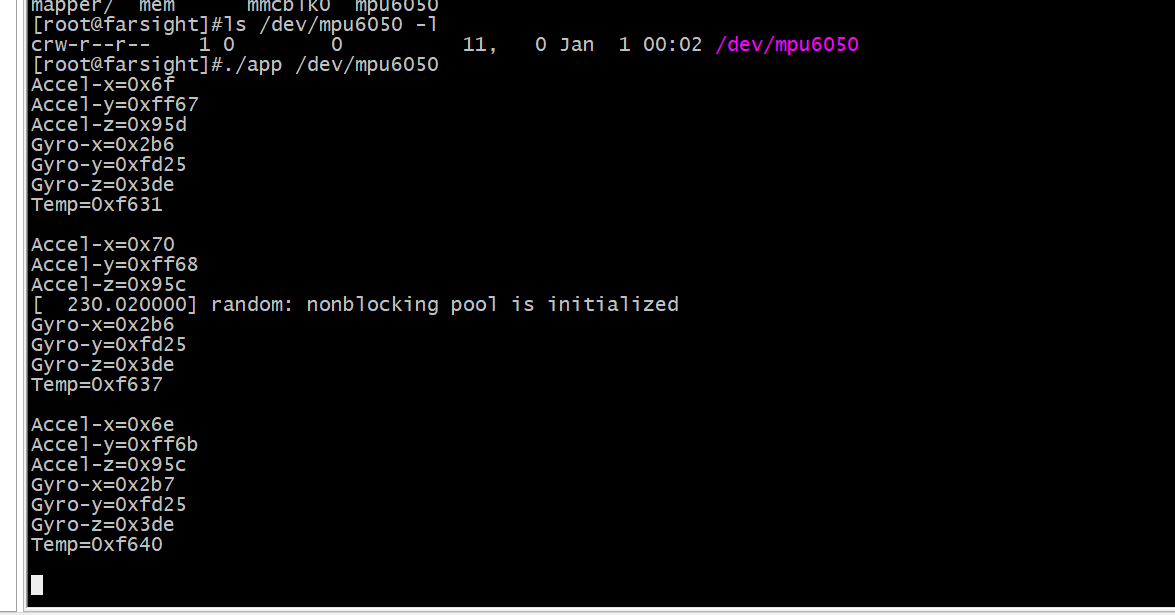
#include <unistd.h>#include <stdio.h>#include "mpu6050.h"int main(int argc,char *argv[])
{int fd = -1;union mpu6050_data data;if(argc < 2){printf("The argument is too few\n");return 1;}fd = open(argv[1],O_RDONLY);if(fd < 0){printf("open %s failed \n",argv[1]);return 2;}while(1){sleep(2);ioctl(fd,GET_ACCEL,&data);printf("Accel-x=0x%x\n",data.accel.x);printf("Accel-y=0x%x\n",data.accel.y);printf("Accel-z=0x%x\n",data.accel.z);ioctl(fd,GET_GYRO,&data);printf("Gyro-x=0x%x\n",data.gyro.x);printf("Gyro-y=0x%x\n",data.gyro.y);printf("Gyro-z=0x%x\n",data.gyro.z);ioctl(fd,GET_TEMP,&data);printf("Temp=0x%x\n",data.temp);printf("\n");}close(fd);fd = -1;return 0;
}
八、I2C总线二级外设驱动开发之设备树匹配
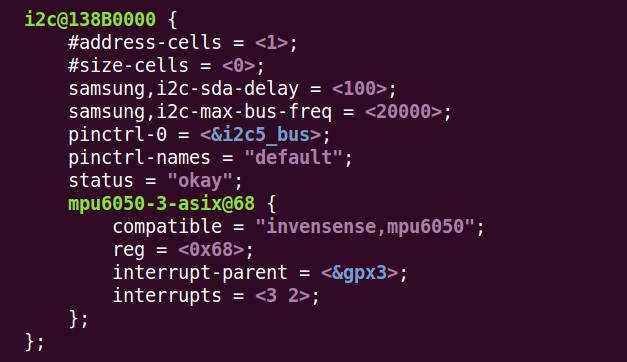
0x68是从设备号,interrupt是中断
IIC的实现和前面LED不太一样那个使用设备树匹配不需要ip IIC需要有一个IP。

#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/i2c.h>
#include <linux/cdev.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/slab.h>
#include <linux/mm.h>
#include <linux/io.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>#include "mpu6050.h"#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define ACCEL_CONFIG 0x1C#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6Bint major = 11;
int minor = 0;
int mpu6050_num = 1;struct mpu6050_dev
{struct cdev mydev;struct i2c_client *pclt;};struct mpu6050_dev *pgmydev = NULL;int mpu6050_read_byte(struct i2c_client *pclt,unsigned char reg)
{int ret = 0;char txbuf[1] = {reg};char rxbuf[1] = {0};struct i2c_msg msg[2] = {{pclt->addr,0,1,txbuf},{pclt->addr,I2C_M_RD,1,rxbuf}};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_read_byte\n",ret);return ret;}return rxbuf[0];
}int mpu6050_write_byte(struct i2c_client *pclt,unsigned char reg,unsigned char val)
{int ret = 0;char txbuf[2] = {reg,val};struct i2c_msg msg[1] = {{pclt->addr,0,2,txbuf},};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_write_byte\n",ret);return ret;}return 0;
}int mpu6050_open(struct inode *pnode,struct file *pfile)
{pfile->private_data =(void *) (container_of(pnode->i_cdev,struct mpu6050_dev,mydev));return 0;
}int mpu6050_close(struct inode *pnode,struct file *pfile)
{return 0;
}long mpu6050_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg)
{struct mpu6050_dev *pmydev = (struct mpu6050_dev *)pfile->private_data;union mpu6050_data data;switch(cmd){case GET_ACCEL:data.accel.x = mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_L);data.accel.x |= mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_H) << 8;data.accel.y = mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_L);data.accel.y |= mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_H) << 8;data.accel.z = mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_L);data.accel.z |= mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_H) << 8;break;case GET_GYRO:data.gyro.x = mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_L);data.gyro.x |= mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_H) << 8;data.gyro.y = mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_L);data.gyro.y |= mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_H) << 8;data.gyro.z = mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_L);data.gyro.z |= mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_H) << 8;break;case GET_TEMP:data.temp = mpu6050_read_byte(pmydev->pclt,TEMP_OUT_L);data.temp |= mpu6050_read_byte(pmydev->pclt,TEMP_OUT_H) << 8;break;default:return -EINVAL;}if(copy_to_user((void *)arg,&data,sizeof(data))){return -EFAULT;}return sizeof(data);
}void init_mpu6050(struct i2c_client *pclt)
{mpu6050_write_byte(pclt,PWR_MGMT_1,0x00);mpu6050_write_byte(pclt,SMPLRT_DIV,0x07);mpu6050_write_byte(pclt,CONFIG,0x06);mpu6050_write_byte(pclt,GYRO_CONFIG,0xF8);mpu6050_write_byte(pclt,ACCEL_CONFIG,0x19);
}struct file_operations myops = {.owner = THIS_MODULE,.open = mpu6050_open,.release = mpu6050_close,.unlocked_ioctl = mpu6050_ioctl,
};static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid)
{int ret = 0;dev_t devno = MKDEV(major,minor);/*申请设备号*/ret = register_chrdev_region(devno,mpu6050_num,"mpu6050");if(ret){ret = alloc_chrdev_region(&devno,minor,mpu6050_num,"mpu6050");if(ret){printk("get devno failed\n");return -1;}major = MAJOR(devno);//容易遗漏,注意}pgmydev = (struct mpu6050_dev *)kmalloc(sizeof(struct mpu6050_dev),GFP_KERNEL);if(NULL == pgmydev){unregister_chrdev_region(devno,mpu6050_num);printk("kmalloc failed\n");return -1;}memset(pgmydev,0,sizeof(struct mpu6050_dev));pgmydev->pclt = pclt;/*给struct cdev对象指定操作函数集*/ cdev_init(&pgmydev->mydev,&myops);/*将struct cdev对象添加到内核对应的数据结构里*/pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,mpu6050_num);init_mpu6050(pgmydev->pclt);return 0;
}static int mpu6050_remove(struct i2c_client *pclt)
{dev_t devno = MKDEV(major,minor);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,mpu6050_num);kfree(pgmydev);pgmydev = NULL;return 0;
}struct of_device_id mpu6050_dt[] =
{{.compatible = "invensense,mpu6050"},{}
};struct i2c_device_id mpu6050_ids[] =
{{"mpu6050",0},{}
};struct i2c_driver mpu6050_driver =
{.driver = {.name = "mpu6050",.owner = THIS_MODULE,.of_match_table = mpu6050_dt,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids,
};#if 0
int __init mpu6050_driver_init(void)
{i2c_add_driver(&mpu6050_driver);
}void __exit mpu6050_driver_exit(void)
{i2c_del_driver(&mpu6050_driver);
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
#else
module_i2c_driver(mpu6050_driver);
#endifMODULE_LICENSE("GPL");
测试程序和.h程序和上面一样。